串口实验
前言
本章将介绍使用串口进行数据的收发操作,具体实现RP2350A与上位机软件的数据通信,RP2350A将接受自上位机软件的数据原原本本地发送回给上位机软件。通过本章的学习,开发者将学习到UART和GPIO引脚的使用。
串口简介
学习串口前,我们先来了解一下数据通信的一些基础概念。
数据通信的基础概念
在单片机的应用中,数据通信是必不可少的一部分,比如:单片机和上位机、单片机和外围器件之间,它们都有数据通信的需求。由于设备之间的电气特性、传输速率、可靠性要求各不相同,于是就有了各种通信类型、通信协议,我们最常的有:USART、IIC、SPI、CAN、USB等。
1,数据通信方式
按数据通信方式分类,可分为串行通信和并行通信两种。串行和并行的对比如下图所示:
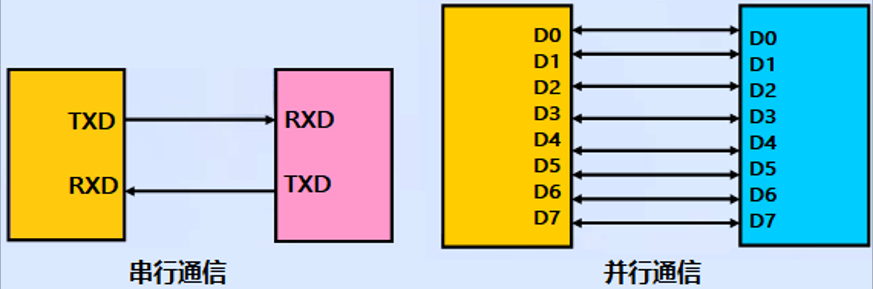
串行通信的基本特征是数据逐位顺序依次传输,优点是传输线少、布线成本低、灵活度高�等优点,一般用于近距离人机交互,特殊处理后也可以用于远距离,缺点就是传输速率低。 而并行通信是数据各位可以通过多条线同时传输,优点是传输速率高,缺点就是布线成本高,抗干扰能力差因而适用于短距离、高速率的通信。
2,数据传输方向
根据数据传输方向,通信又可分为全双工、半双工和单工通信。全双工、半双工和单工通信的比较如下图所示:
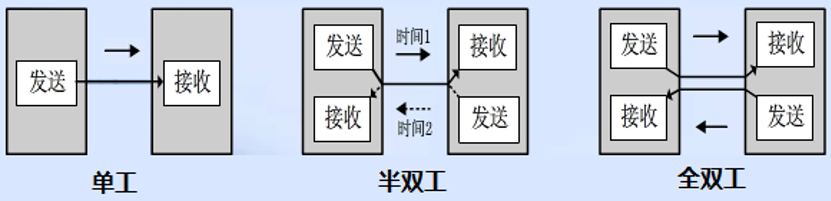
单工是指数据传输仅能沿一个方向,不能实现反方向传输,如校园广播。 半双工是指数据传输可以沿着两个方向,但是需要分时进行,如对讲机。 全双工是指数据可以同时进行双向传输,日常的打电话属于这种情形。 这里注意全双工和半双工通信的区别:半双工通信是共用一条线路实现双向通信,而全双工是利用两条线路,一条用于发送数据,另一条用于接收数据。
3,数据同步方式
根据数据同步方式,通信又可分为同步通信和异步通信。同步通信和异步通信比较如下图所示:
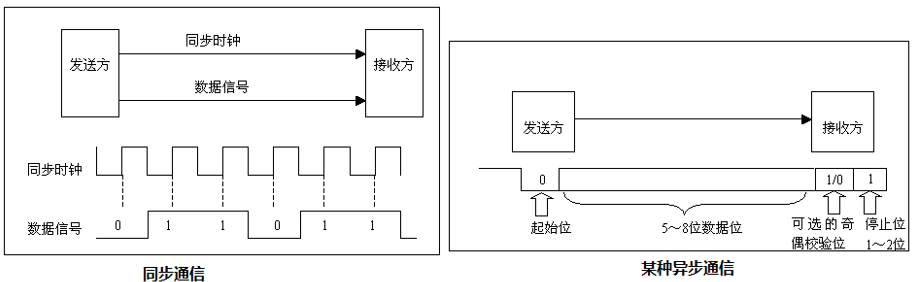
同步通信要求通信双方共用同一时钟信号,在总线上保持统一的时序和周期完成信息传输。��优点:可以实现高速率、大容量的数据传输,以及点对多点传输。缺点:要求发送时钟和接收时钟保持严格同步,收发双方时钟允许的误差较小,同时硬件复杂。 异步通信不需要时钟信号,而是在数据信号中加入开始位和停止位等一些同步信号,以便使接收端能够正确地将每一个字符接收下来,某些通信中还需要双方约定传输速率。优点:没有时钟信号硬件简单,双方时钟可允许一定误差。缺点:通信速率较低,只适用点对点传输。
4,通信速率
在数字通信系统中,通信速率(传输速率)指数据在信道中传输的速度,它分为两种:传信率和传码率。
传信率:每秒钟传输的信息量,即每秒钟传输的二进制位数,单位为bit/s(即比特每秒),因而又称为比特率。
传码率:每秒钟传输的码元个数,单位为Baud(即波特每秒),因而又称为波特率。
另外,比特率和波特率也是有一定的关系的。
比特率和波特率的关系可以用以下式子表示:比特率 = 波特率 * log2M,其中M表示码元承载的信息量。我们也可以理解M为码元的进制数。
RP2350A的UART简介
RP2350具有基于Arm Primecell UART(PL011)的两个相同的UART外围设备,每个外设具有以下特征:
| 特征 | 描述 |
|---|---|
| Separate 32×8 TX and 32×12 RX FIFOs | 用于发送(TX)和接收(RX)的专用FIFO,分别具有32×8和32×12的大小。 |
| Programmable baud rate generator, clocked by clk_peri | 允许使用时钟信号调整波特率( clk_peri) |
| Standard asynchronous communication bits (start, stop, parity) added on transmit and removed on receive | 标准异步通信比特,包括在传输过程中添加并在接收过程中移除的开始位、停止位和奇偶位。 |
| Line break detection | 检测数据传输中的线路中断 |
| Programmable serial interface (5, 6, 7, or 8 bits) | 可配置的串行数据位宽(5、6、7或8位) |
| 1 or 2 stop bits | 可配置的数据传输停止位数(1或2) |
| Programmable hardware flow control | 允许设置硬件流量控制(RTS/CTS) |
同时,每个 UART 都可以连接到多个 GPIO 引脚,详细内容请参照数据手册中的第 9.4 节的 GPIO 多路复用表。
硬件设计
例程功能
- 回显串口接收到的数据
- 每间隔一定时间,串口发送一段提示信息
- LED闪烁,提示程序正在运行
硬件资源
-
LED: LED-GPIO3
-
uart0:(UART0_TX、UART0_RX连接至板载USB转串口芯片上)
UART0_TX-GPIO0
UART0_RX-GPIO1
原理图
板载的USB转串口芯片的USB接口通过板载的USB UART端口引出,其原理图如下图所示:
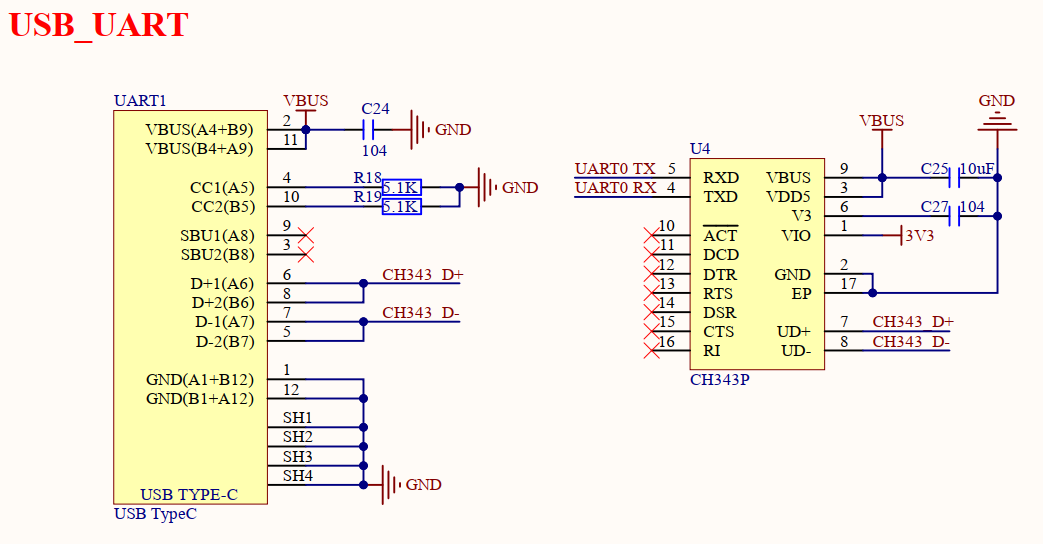
从以上原理图可以看出,TXD引脚和RXD引脚分别作为发送和接收引脚分别与USB转串口芯片的接收和发送引脚进行连接,USB转串口芯片再通过一对USB差分信号连接至USB UART的接口,这样一来,RP2350A就可以通过USB与PC上位机软件进行串口通信了。 另外RP2350A有两个串口,即 uart0、uart1。
程序设计
UART函数解析
Pico-sdk提供了一套API来配置串口,值得一提的是,串口的初始化函数已经封装进stdio_init_all()函数中,因此我们并不需要对串口进行额外的配置,直接调用API提供的函数即可。那么下面作者将介绍一下在实验中调用到的API函数:
UART初始化函数
该函数用于初始化一个串口,其函数原型如下所示:
uart_init(uart_inst_t *uart, uint baudrate)
【参数】
uart_inst_t *uart:指向UART硬件实例的指针,如:uart0或uart1
baudrate:它代表串口的波特率,即数据传输速率,具体指的是每秒传输的位数。
【返回值】
无
UART接收数据就绪
该函数用于检测指定UART接口的接收缓冲区中是否有数据可读。具体来说,它通过查询UART硬件标志寄存器中的RXFE(Receive FIFO Empty,接收FIFO空)位,判断接收缓冲区是否为空。其函数原型如下所示:
uart_is_readable(uart_inst_t *uart)
【参数】
uart_inst_t *uart:指向UART硬件实例的指针,如:uart0或uart1
【返回值】
!(uart_get_hw(uart)->fr & UART_UARTFR_RXFE_BITS)
【返回值解析】
uart_get_hw(uart)->fr:获取UART硬件标志寄存器(Flag Register)的值。
UART_UARTFR_RXFE_BITS:是接收FIFO空(RXFE)位的掩码。当该位为1时,表示接收FIFO为空;为0时,表示FIFO中有数据。
【返回值逻辑】
若 RXFE 位为 1 → 接收FIFO为空 → 函数返回 false(不可读)
若 RXFE 位为 0 → 接收FIFO非空 → 函数返回 true(可读)
UART读取单字节
该函数的作用是阻塞式地读取UART接口的一个字节数据,并将其作为char类型返回。其函数原型如下所示:
uart_getc(uart_inst_t *uart)
【参数】
uart_inst_t *uart:指向UART硬件实例的指针,如:uart0或uart1
【返回值】
char c:从UART接收缓冲区读取的1字节数据
UART发送单字节
该函数用于向指定UART接口发送一个字符,并根据配置决定是否在发送特定字符时自动插入回车符(\r),以支持CRLF(Carriage Return + Line Feed)格式的换行兼容性。其函数原型如下所示:
uart_putc(uart_inst_t *uart, char c)
【参数】
uart_inst_t *uart:指向UART硬件实例的指针,如:uart0或uart1
char c:待发送的字符
【返回值】
无
配置UART硬件流控制模式
该函数用于配置UART(通用异步收发器)的硬件流控制模式,通过设置CTS(Clear To Send)和RTS(Request To Send)信号使能位,控制数据流的启停,防止通信过程中的数据丢失或溢出。其函数原型如下所示:
static inline void uart_set_hw_flow(uart_inst_t *uart, bool cts, bool rts)
【参数】
uart_inst_t *uart:指向UART硬件实例的指针,如:uart0或uart1
cts:该参数为bool类型。若为true,则启用CTS流控制,发送方根据CTS信号状态决定是否发送数据。
rts:该参数为bool类型。若为true,则启用RTS流控制,接收方通过RTS信号通知发送方暂停传输。
【返回值】
无
配置UART通信格式
该函数用于配置UART(通用异步收发器)的通信格式,包括数据位长度、停止位数量和奇偶校验类型。其核心操作是通过修改UART的线控制寄存器的特定位域,实现参数设置。其函数原型如下所示:
void uart_set_format(uart_inst_t *uart, uint data_bits, uint stop_bits, uart_parity_t parity)
【参数】
uart_inst_t *uart:指向UART硬件实例的指针,如:uart0或uart1
data_bits:数据位长度,取值范围为5、6、7或8。
stop_bits:停止位数量,取值为1或2。
parity:奇偶校验类型,可选UART_PARITY_NONE、UART_PARITY_EVEN或UART_PARITY_ODD。
【返回值】
无
配置UART FIFO功能
该函数的作用是开启或者关闭 UART的 FIFO(先进先出缓冲区)功能。其函数原型如下所示:
void uart_set_fifo_enabled(uart_inst_t *uart, bool enabled)
【参数】
uart_inst_t *uart:指向UART硬件实例的指针,如:uart0或uart1
bool enabled:这是一个布尔类型的参数,若为 true,则开启 FIFO 功能;若为 false,则关闭 FIFO 功能。
【返回值】
无
配置中断处理程序
该函数的主要功能是为指定的中断请求(IRQ)设置一个独占的处理程序。独占意味着该中断号之前没有被其他处理程序占用,或者已经被当前要设置的处理程序占用,以确保中断处理的唯一性。其函数原型如下所示:
void uart_set_fifo_enabled(uart_inst_t *uart, bool enabled)
【参数】
uint num:这是一个无符号整数类型的参数,代表要设置处理程序的中断号。
irq_handler_t handler:这是一个函数指针类型的参数,指向要为该中断设置的处理程序。
【返回值】
无
配置指定编号的中断请求
该函数的主要功能是启用或禁用指定编号的中断请求(IRQ)。通过设置相应的标志位,可以控制某个特定中断是否能够触发中断服务程序。其函数原型如下所示:
void irq_set_enabled(uint num, bool enabled)
【参数】
uint num:这是一个无符号整数类型的参数,代表要设置处理程序的中断号。
bool enabled:这是一个布尔类型的参数,若为 true,则启用指定中断;若为 false,则禁用指定中断。
【返回值】
无
配置UART中断使能状态
该函数的主要功能是设置 UART的中断使能状态。具体来说,它可以分别控制接收数据中断(当接收缓冲区有数据时触发)和发送数据中断(当发送缓冲区需要数据时触发)是否启用。其函数原型如下所示:
static inline void uart_set_irq_enables(uart_inst_t *uart, bool rx_has_data, bool tx_needs_data)
【参数】
uart_inst_t *uart:指向UART硬件实例的指针,如:uart0或uart1
bool rx_has_data:这是一个布尔类型的参数,用于控制接收数据中断的使能状态。如果为 true,则启用接收数据中断;如果为 false,则禁用该中断。
bool tx_needs_data:这也是一个布尔类型的参数,用于控制发送数据中断的使能状态。如果为 true,则启用发送数据中断;如果为 false,则禁用该中断。
【返回值】
无
UART驱动解析
在SDK版本的04_uart例程中,作者在04_uart\BSP路径下新增了一个UART文件夹,用于存放uart.c和uart.h这两个文件。其中,uart.h文件负责声明PWM相关的函数和变量,而uart.c文件则实现了UART的驱动代码。下面,我们将详细解析这两个文件的实现内容。
1,uart.h文件
/* 引脚和串口定义 */
#define UART_UX uart0
#define UART_BAUD_RATE 115200
#define UART_TX_GPIO_PIN 0
#define UART_RX_GPIO_PIN 1
/* 串口接收相关定义 */
#define RX_BUF_SIZE 1024 /* 自定义环形缓冲区大小 */
extern uint8_t rx_buffer[RX_BUF_SIZE];
extern volatile size_t rx_head;
extern volatile size_t rx_tail;
/* 函数声明 */
void uartx_init(uint32_t baudrate); /* 初始化串口 */
size_t uartx_get_buffered_data_len(); /* 获取缓冲区数据长度 */
void uartx_rx_int(); /* UART中断处理 */
2,uart.c文件
uint8_t rx_buffer[RX_BUF_SIZE]; /* 自定义环形缓冲区 */
volatile size_t rx_head = 0;
volatile size_t rx_tail = 0;
/**
* @brief 获取缓冲区数据长度
* @param 无
* @note 无
* @retval 无
*/
size_t uartx_get_buffered_data_len()
{
return (rx_head - rx_tail + RX_BUF_SIZE) % RX_BUF_SIZE;
}
/**
* @brief UART中断处理
* @param 无
* @note 无
* @retval 无
*/
void uartx_rx_int()
{
while (uart_is_readable(UART_UX))
{
uint8_t ch = uart_getc(UART_UX);
size_t next_head = (rx_head + 1) % RX_BUF_SIZE;
if (next_head != rx_tail) /* 防止溢出 */
{
rx_buffer[rx_head] = ch;
rx_head = next_head;
}
}
}
/**
* @brief 初始化串口
* @param baudrate: 波特率, 根据自己需要设置波特率值
* @note 注意: 必须设置正确的时钟源, 否则串口波特率就会设置异常.
* @retval 无
*/
void uartx_init(uint32_t baudrate)
{
uart_init(UART_UX, baudrate);
gpio_set_function(UART_TX_GPIO_PIN, GPIO_FUNC_UART);
gpio_set_function(UART_RX_GPIO_PIN, GPIO_FUNC_UART);
uart_set_hw_flow(UART_UX, false, false);
uart_set_format(UART_UX, 8, 1, UART_PARITY_NONE);
uart_set_fifo_enabled(UART_UX, true);
/* UART中断处理 */
irq_set_exclusive_handler(UART0_IRQ, uartx_rx_int);
irq_set_enabled(UART0_IRQ, true);
uart_set_irq_enables(UART_UX, true, false);
}
rx_buffer是一个大小为 RX_BUF_SIZE 的无符号 8 位整数数组,用作环形缓冲区。环形缓冲区是一种常见的数据结构,用于在有限的内存空间内循环存储数据,常用于处理数据流,如串口数据接收。rx_head是一个 volatile 修饰的 size_t 类型变量,用于指示环形缓冲区中数据写入的位置。rx_tail同样是 volatile 修饰的 size_t 类型变量,用于指示环形缓冲区中数据读取的位置。结合以上内容,代码实现了一个 UART 接收功能,包括初始化 UART、处理接收中断以及计算缓冲区数据长度。通过环形缓冲区存储接收到的数据,方便后续处理。
CMakeLists.txt文件
打开本章节的实验(04_uart),在整个工程文件下包含了一个CMakeLists.txt文件。关于该实验的CMakeLists.txt文件的具体内容与上一章节并没有什么太大的不同,因此不再赘述。
实验应用代码
打开main.c文件,该文件定义了工程入口函数,名为main。该函数代码如下。
/**
* @brief 程序入口
* @param 无
* @retval 无
*/
int main()
{
uint16_t times = 0;
uint8_t data[RX_BUF_SIZE];
stdio_init_all(); /* 初始化标准库 */
led_init(); /* 初始化LED */
uartx_init(115200); /* 初始化UART */
while (1)
{
size_t len = uartx_get_buffered_data_len();
if (len > 0)
{
memset(data, 0, RX_BUF_SIZE);
for (size_t i = 0; i < len; i++) /* 从缓冲区读取数据 */
{
data[i] = rx_buffer[rx_tail];
rx_tail = (rx_tail + 1) % RX_BUF_SIZE;
}
uart_write_blocking(UART_UX, data, len); /* 阻塞式写回 */
}
else
{
times++;
if (times % 200 == 0)
{
printf("\nATK-DNRP2350AM Board Serial Port Experiment\r\n");
}
if (times % 50 == 0)
{
printf("Please enter data\r\n");
}
if (times % 30 == 0)
{
LED_TOGGLE();
}
sleep_ms(10); /* 延时10ms */
}
}
}
本实验的实验代码很简单,在完成初始化后,就不断地通过串口通信驱动提供的数据接收并判断数据长度大小,若还未完成数据接收,则每间隔一段时间就使用printf通过uart0打印一段提示信息,若数据接收完毕,则将数据原原本本地使用printf通过uart0打印出去,实现数据的回显功能。
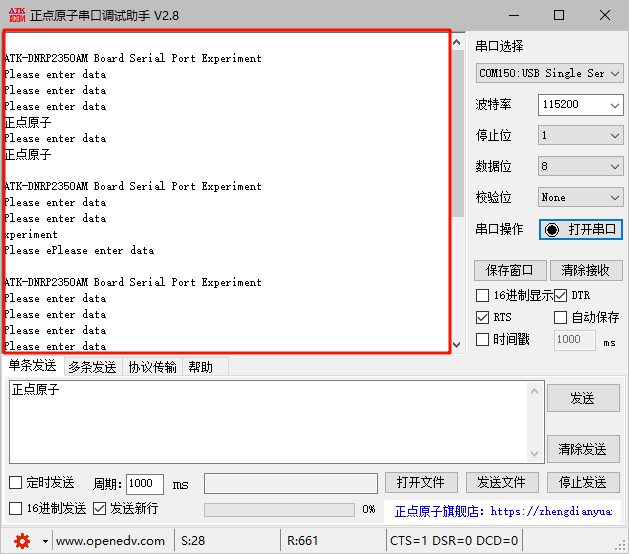
下载验证
在完成编译和烧录操作后,需要将开发板的USB UART接口与PC的USB接口通过具有数据传输功能的数据线进行连接。接着打开PC上的ATK-XCOM串口调试助手软件,选择好正确的COM端口和相关的配置后,就能看到串口调试助手上每间隔一段时间就打印一次“请输出数据,以回车键结束”,接下来就可以根据提示通过串口调试助手发送一段任意的数据(以回车换行结束),随后立马就能看到串口调试助手上显示发送出去的数据,这就是本实验实现的数据回显功能。