摄像头实验
前言
本章将介绍CanMV下摄像头的使用,能通过摄像头实时地采集摄像头捕获到的图像数据,从而进行进一步的处理。通过本章的学习,读者将学习到通过CanMV驱动摄像头实时捕获图像数据。
Sensor模块介绍
概述
K230D CanMV平台sensor模块负责图像采集处理任务。本模块提供了一系列Highe Levl的API,应用开发者可以不用关注底层硬件细节,仅通过该模块提供的API即可获取不同格式和尺寸的图像。
K230D CanMV平台sensor模块包括三个独立的能力完全相同的sensor设备,每个sensor设备均可独立完成图像数据采集捕获处理,并可以同时输出3路图像数据。如下图所示:
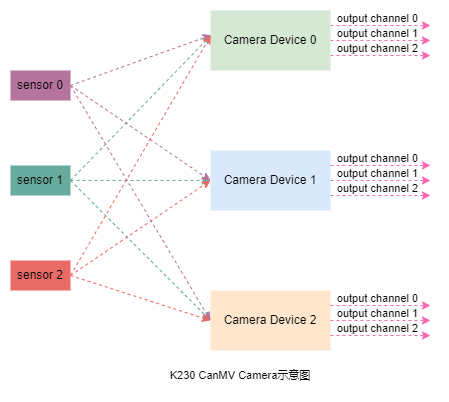
sensor 0,sensor 1,sensor 2表示三个图像传感器;Camera Device 0,Camera Device 1,Camera Device 2表示三个sensor设备;output channel 0,output channel 1,output channel 2表示sensor设备的三个输出通道。三个图像传感器可以通过软件配置映射到不同的sensor 设备。
API描述
FPIOA类位于machine模块下
构造函数
【描述】
根据csi id和摄像头类型构建Sensor对象
用户需要先构建Sensor对象再继续操作
目前已实现自动探测摄像头,用户可选择输出图像的最大分辨率和帧率,参考摄像头列表
用户设置目标分辨率和帧率之后,如果底层驱动不支持该设置,则会进行自动匹配出最佳配置
具体使用的配置可参考日志,如use sensor 23, output 640x480@90
sensor = Sensor(id, [width, height, fps])
【参数】
- id:csi端口,取值:[0,2],可选参数
- width:sensor最大输出图像宽度,可选参数,默认1920
- height:sensor最大输出图像高度,可选参数,默认1080
- fps:sensor最大输出图像帧率,可选参数,默认30
【返回值】
Sensor对象
sensor.reset
复位sensor
sensor.reset()
设置引脚的功能
【参数】
无
【返回值】
无
sensor.set_framesize
设置指定通道的输出图像尺寸
注意:宽度会自动对齐到16像素宽
sensor.set_framesize(framesize = FRAME_SIZE_INVAILD, chn = CAM_CHN_ID_0, alignment=0, **kwargs)
【参数】
- framesize:sensor输出图像尺寸
- chn:sensor输出通道号
- width:输出图像宽度
- height:输出图像高度
【返回值】
无
注意:输出图像尺寸不能超过摄像头实际输出。
不同输出通道最大可输出图像尺寸由硬件限制。
sensor.set_pixformat
设置指定sensor设备和通道的输出图像格式
sensor.set_pixformat(pix_format, chn = CAM_CHN_ID_0)
【参数】
- pix_format:sensor输出�图像格式
- chn:sensor输出通道号
【返回值】
无
sensor.bind_info
在Display.bind_layer时使用,获取绑定信息
sensor.bind_info(x = 0, y = 0, chn = CAM_CHN_ID_0)
【参数】
- x:将sensor指定通道输出图像绑定到Display或Venc模块的指定坐标
- y:将sensor指定通道输出图像绑定到Display或Venc模块的指定坐标
- chn:sensor输出通道号
【返回值】
无
sensor.snapshot
从指定sensor设备的支持输出通道中捕获一帧图像数据
sensor.snapshot(chn = CAM_CHN_ID_0)
【参数】
- chn:sensor输出通道号
【返回值】
image对象:成功
其他: 失败
sensor.run
摄像头开始输出
sensor.run()
【参数】
无
【返回值】
无
注意:如果同时使用多个摄像头(最多3个),只需要其中一个执行run即可
sensor.stop
停止sensor输出
sensor.stop()
【参数】
无
【返回值】
无
注意:如果同时使用多个摄像头(最多3个),需要每一个都执行stop
更多用法请阅读官方API手册:
硬件设计
例程功能
- 使用
sensor模块初始化板载的摄像头,并对摄像头的输出帧大小以及输出格式等进行配置,最后获取摄像头采集到的图像数据,并在LCD以及CanMV IDE软件的“帧缓冲区”窗口进行显示。
硬件资源
-
摄像头 - MIPI CSI0
-
LCD - MIPI DSI
原理图
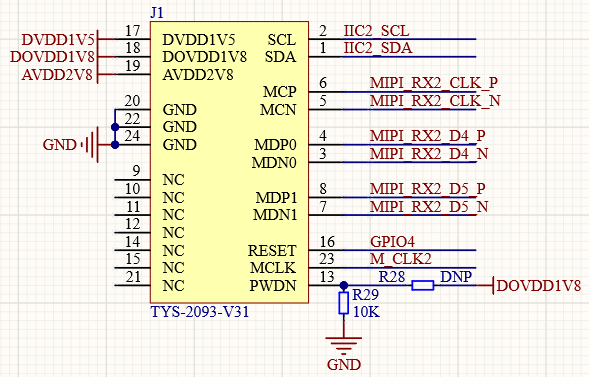
本章实验内容,需要使用到板载的摄像头接口,在正点原子K230D BOX开发板上有两处MIPI摄像头接口位于正点原子CNK230DF核心板,该接口可以直接连接K230D BOX开发板自带的GC2093摄像头模组使用,但需要特别注意的是,我们的例程默认是使用MIPI CSI2接口使用的,即CNK230DF核心板上的J1接口处(摄像头默认连接处)。
正点原子K230D BOX开发板上的GC2093摄像头模块接口的连接原理图,如下图所示:
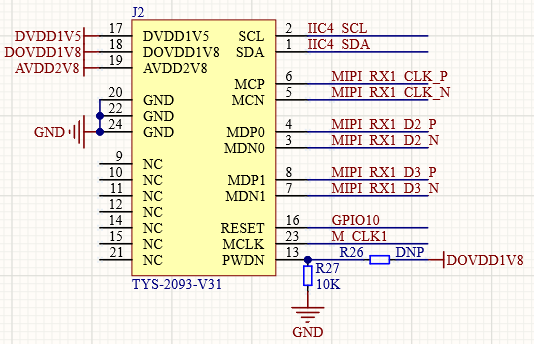
同时正点原子CNK230DF核心板也提供了MIPI CSI1摄像头接口,同时支持两路摄像头输入(K230D最多支持3路),MIPI摄像头接口的连接原理图,如下图所示:
实验代码
import time, os, sys
from media.sensor import * #导入sensor模块,使用摄像头相关接口
from media.display import * #导入display模块,使用display相关接口
from media.media import * #导入media模块,使用meida相关接口
try:
sensor = Sensor(width=1280, height = 960) #构建�摄像头对象
sensor.reset() #复位和初始化摄像头
sensor.set_framesize(Sensor.VGA) #设置帧大小VGA(640x480),默认通道0
sensor.set_pixformat(Sensor.YUV420SP) #设置输出图像格式,默认通道0
# 将通道0图像绑定到视频输出
bind_info = sensor.bind_info()
Display.bind_layer(**bind_info, layer=Display.LAYER_VIDEO1)
#使用IDE缓冲区输出图像,显示尺寸和sensor配置一致。
Display.init(Display.ST7701, sensor.width(), sensor.height(), fps=90, to_ide=True)
MediaManager.init() #初始化media资源管理器
sensor.run() #启动sensor
while True:
os.exitpoint() #检测IDE中断
# IDE中断释放资源代码
except KeyboardInterrupt as e:
print("user stop: ", e)
except BaseException as e:
print(f"Exception {e}")
finally:
# sensor stop run
if isinstance(sensor, Sensor):
sensor.stop()
# deinit display
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# release media buffer
MediaManager.deinit()
可以看到,首先导入相关的模块,然后使用try-except-finally用于异常捕获的处理,在try块编写可能引发异常的代码,我们首先构建Sensor的对象,然后进行复位(手册中说明在构造Sensor对象之后,必须调用复位函数才能继续其他操作),接着使用sensor.bind_info函数和Display.bind_layer函数将通道0的图像数据持续输出到屏幕,然后启动sensor,这样摄像头输出的一路数据就能持续的输出到LCD显示器上,无需在while循环中再进行操作。
except块负责采集异常信息,我们这里有KeyboardInterrupt和BaseException这两个不同异常类型的except块,当发生异常时将异常信息打印出来。
finally块是无论是否发生异常,finally块中的代码都会执行,我们这里主要用于模块停止和资源释放。
运行验证
将K230D BOX开发板连接CanMV IDE,并点击CanMV IDE上的“开始(运行脚本)”按钮后,可以看到LCD上实时地显示这摄像头采集到的画面,如下图所示:

也可以在CanMV IDE看到摄像头采集的画面,如下图所示: