跑马灯实验
前言
本章实验将介绍如何使用CanMV让Kendryte K230D控制板载的双色LED闪烁,以实现跑马灯的效果。通过本章的学习,读者将学习到在CanMV下控制Kendryte K230D的GPIO输出高低电平。
FPIOA模块介绍
概述
IOMUX主要配置物理PAD(管脚)的功能,由于soc功能多管脚(pads)少,多个功能共享同一个I/O管脚(pads),但是一个pads同一时间只能使用其中一个功能,所以需要IOMUX��进行功能选择。IOMUX也叫FPIOA,Pin multiplexing,管脚功能选择等。
API描述
FPIOA类位于machine模块下
构造函数
fpioa = FPIOA()
【参数】
无
set_function
FPIOA.set_function(pin, func, ie=-1, oe=-1, pu=-1, pd=-1, st=-1, sl=-1, ds=-1)
设置引脚的功能
【参数】
- pin:引脚号,取值:[0,63]
- func:功能号
- ie:重新设置输入使能,可选参数
- oe:重新设置输出使能,可选参数
- pu:重新设置上拉使能,可选参数
- pd:重新设置下拉使能,可选参数
- st:重新设置st使能,可选参数
- sl:重新设置sl使能,可选参数
- ds:重新设置驱动能力,可选参数
【返回值】
无
更多用法请阅读官方API手册:
Pin模块介绍
概述
K230D内部包含64个GPIO Pin,每个Pin可配置为输入或输出,可配置上下拉,可配置驱动能力。
API描述
Pin类位于machine模块下
构造函数
pin = Pin(index, mode, pull=Pin.PULL_NONE, drive=7)
【参数】
- index:引脚号,取值:[0,63]
- mode:输入或输出模式
- pull:上下拉配置,可选参数,默认PULL_NONE
- drive:驱动能力配置,可选参数,默认7
value
Pin.value([value])
获取引脚输入或设置引脚输出
【参数】
- value:输出值,可选参数,如果不传参数则返回输入值
【返回值】
返回空或当前引脚输入值
mode
Pin.mode([mode])
获取或设置引脚输入输出模式
【参数】
- mode:输入输出模式,可选参数,如果不传参数则返回当前输入输出模式
【返回值】
返回空或当前引脚输入输出模式
pull
Pin.pull([pull])
获取或设置引脚上下拉配置
【参数】
- pull:上下拉配置,可选参数,如果不传参数则返回当前上下拉配置
【返回值】
返回空或当前引脚上下拉配置
drive
Pin.drive([drive])
获取或设置引脚驱动能力
【参数】
- drive:驱动能��力,可选参数,如果不传参数则返回当前驱动能力
【返回值】
返回空或当前引脚驱动能力
on
Pin.on()
设置输出高
【参数】
无
【返回值】
无
off
Pin.off()
设置输出低
【参数】
无
【返回值】
无
high
Pin.high()
设置输出高
【参数】
无
【返回值】
无
low
Pin.low()
设置输出低
【参数】
无
【返回值��】
无
更多用法请阅读官方API手册:
硬件设计
例程功能
- 控制板载双色LED轮流闪烁,实现跑马灯的效果
硬件资源
- 双色LED
LEDR - IO61
LEDB - IO59
原理图
本章实验内容,需要控制板载双色LED轮流闪烁,以实现跑马灯的效果,正点原子K230D BOX开发板上双色LED的连接原理图,如下图所示:
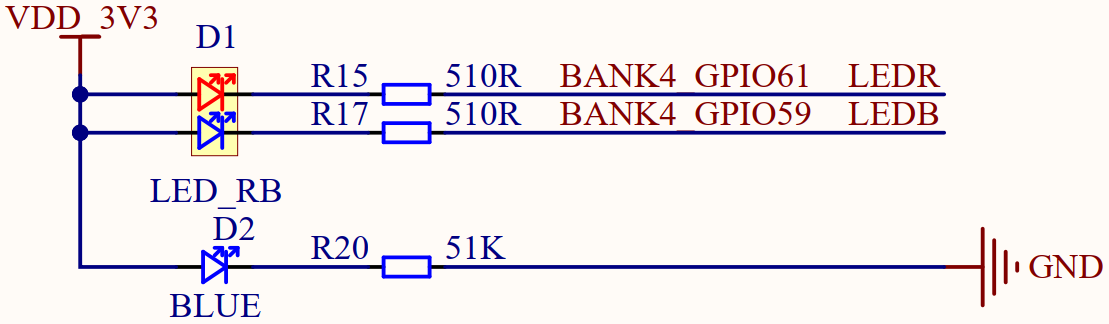
通过以上原理图可以看出,双色LED中红色和蓝色LED对应的IO编号分别为IO61和IO59,且都是当IO输出低电平时LED亮起,当IO输出高电平时LED熄灭。
实验代码
from machine import Pin
from machine import FPIOA
import time
# 实例化FPIOA
fpioa = FPIOA()
# 设置Pin59为GPIO59,Pin61为GPIO61
fpioa.set_function(59, FPIOA.GPIO59)
fpioa.set_function(61, FPIOA.GPIO61)
# 实例化蓝色LED灯和红色LED灯引脚为输出
ledr = Pin(61, Pin.OUT, pull=Pin.PULL_NONE, drive=7)
ledb = Pin(59, Pin.OUT, pull=Pin.PULL_NONE, drive=7)
# 设置输出为高
ledb.value(1)
# pin.on()
# pin.high()
# 设置输出为低
ledb.value(0)
# pin.off()
# pin.low()
while True:
# 设置LED对应的GPIO对象输出对应的高低电平
ledb.value(1)
ledr.value(0)
time.sleep_ms(200)
ledb.value(0)
ledr.value(1)
time.sleep_ms(200)
可以看到,首先通过FPIOA构造函数构造了fpioa对象,然后通过set_function函数为控制双色LED的两个IO分别分配了GPIO59和GPIO61的功能,再通过Pin模块的构造函数构造两个LED灯对象,均配置为输出模式并配置驱动能力,最后在一个循环中轮流设置这两个GPIO对象输出不同的高��低电平并延时一段时间,从而应该能看到板载的双色LED轮流亮起、熄灭,实现跑马灯的效果。
运行验证
将K230D BOX开发板连接CanMV IDE,并点击CanMV IDE上的“开始(运行脚本)”按钮后,可以看到板载的双色LED轮流亮起、熄灭,实现跑马灯的效果,这与理论推断的结果一致。