跑马灯实验
前言
本章实验将介绍如何使用MicroPython让Raspberry RP2350A开发板板载的LED闪烁,以实现跑马灯的效果。通过本章的学习,读者将学习到如何使用MicroPython控制RP2350A的GPIO输出高低电平。
GPIO & LED简介
GPIO简介
GPIO是负责控制或采集外部器件信息的外设,主要负责输入输出功能。RP2350最多有54个多功能通用输入/输出(GPIO)引脚,分为两组:QFN-60封装中的Bank 0 30个用户GPIO(RP2350A),或QFN-80封装中的48个用户GPIO Bank 1 6个QSPI IO,以及USB DP/DM引脚,以下我们展示的是RP2350A的引脚分布图:
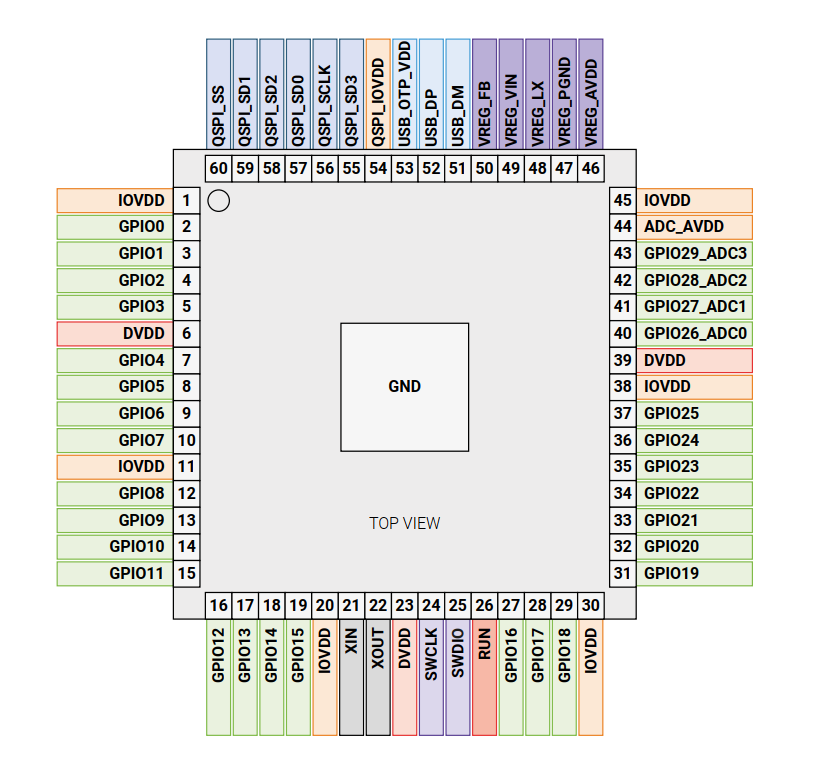
从上面的图示中可见,绿色区域的管脚均可作为普通的IO端口使用。因此,在控制LED灯时,我们可以对连接LED灯的管脚进行操作。但需要开发者在操作过程中参考相关技术手册,以规避潜在的问题。在正点原子的DNRP2350AM开发板中,芯片的GPIO3连接LED灯的负极,因此在本章的实验中,我们将主要对GPIO3进行操作。
LED简介
LED,即发光二极管,其发光原理基于半导体的特性。在半导体中,有两类重要的载流子:电子,主要存在于n型半导体中;而空穴,则主要存在于p型半导体中。当n型半导体与p型半导体材料接触时,它们的交界处会形成一个特殊的层结。当对这个层结施加适当的电压时,层结中的空穴与电子会发生重组,并释放出能量。这些能量会以光子的形式被释放出来,从而产生可见光。这就是LED发光的基本原理。
1,LED灯驱动原理
LED驱动是指通过稳定的电源为LED提供适宜的电流和电压,确保其正常发光。LED驱动方式主要有恒流和恒压两种,其中,恒流驱动因其能限定电流而备受青睐。由于LED灯对电流变化极为敏感,一旦电流超过其额定值,可能导致损坏。因此,恒流驱动通过确保电流的稳定性,进而保障LED的安全运行。
2,LED灯驱动方式
下面,我们来看一下LED两种驱动方式:
(1)灌入电流接法。指的是LED的供电电流是由外部提供电流,将电流灌入我们的MCU;风险是当外部电源出现变化时,会导致MCU的引脚烧坏。其接法如下图所示:

(2)输出电流接法。指的是由MCU提供电压电流,将电流输出给LED;如果使用 MCU的GPIO 直接驱动 LED,则驱动能力较弱,可能无法提供足够的电流驱动 LED。其接法如下图所示:
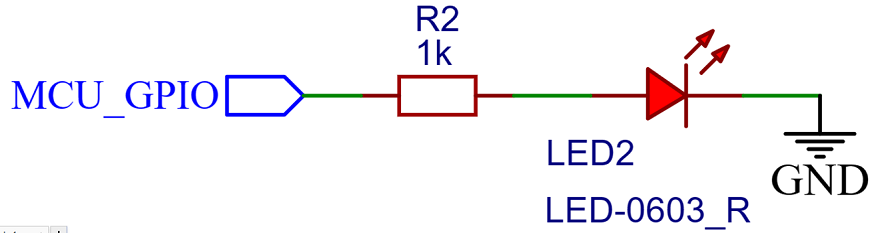
DNRP2350AM开发板上的LED采用灌入电流接法,这种方式避免了MCU直接提供电压电流来驱动LED,从而有效减轻了MCU的负载。这使得MCU能够更加专注于执行其他核心任务,进而提升了整体系统的性能和稳定性。
Pin模块介绍
概述
Pin对象用于控制I/O引脚(也称为GPIO - 通用输入/输出引脚),通常与可以驱动输出电压和读取输入电压的物理引脚相关联。Pin模块具有设置引脚模式(IN, OUT等)的方法以及获取和设置数字逻辑电平的方法。
API描述
Pin类位于machine模块下
构造函数
pin = Pin(id, mode, pull=-1, value, alt=-1)
【参数】
- id:引脚号,取值:[0,29]
- mode:工作模式,可以是:Pin.IN、Pin.OUT、Pin.OPEN_DRAIN、Pin.ALT、Pin.ANALOG
- pull:上下拉配置,可选参数,可以是:None、Pin.PULL_UP、Pin.PULL_DOWN
- value:仅在Pin.OUT、Pin.OPEN_DRAIN模式下配置有效,配置初始化引脚的输出
- alt:仅在Pin.ALT模式下有效,为引脚指定一个配置函数
value
Pin.value([value])
获取引脚输入或设置引脚输出
【参数】
- value:输出值,可选参数,如果不传参数则返回输入值
【返回值】
返回空或当前引脚输入值
mode
Pin.mode([mode])
获取或设置引脚输入输出模式
【参数】
- mode:输入输出模式,输入参数可参考构建函数的工作模式
【返回值】
返回空或当前引脚输入输出模式
pull
Pin.pull([pull])
获取或设置引脚上下拉配置
【参数】
- pull:上下拉配置,可选参数,如果不传参数则返回当前上下拉配置
【返回值】
返回空或当前引脚上下拉配置
on
Pin.on()
设置输出高
【参数】
无
【返回值】
无
off
Pin.off()
设置输出低
【参数】
无
【返回值】
无
high
Pin.high()
设置输出高
【参数】
无
【返回值】
无
low
Pin.low()
设置输出低
【参数】
无
【返回值】
无
更多用法请阅读MicroPython官方API手册:
https://docs.micropython.org/en/latest/library/machine.Pin.html#machine-pin
硬件设计
例程功能
- 控制板载LED闪��烁,实现跑马灯的效果
硬件资源
- LED
LED - GPIO3
原理图
本章实验内容,需要控制LED灯以500ms的频率交替闪烁,正点原子DNRP2350AM开发板上LED灯的连接原理图,如下图所示:
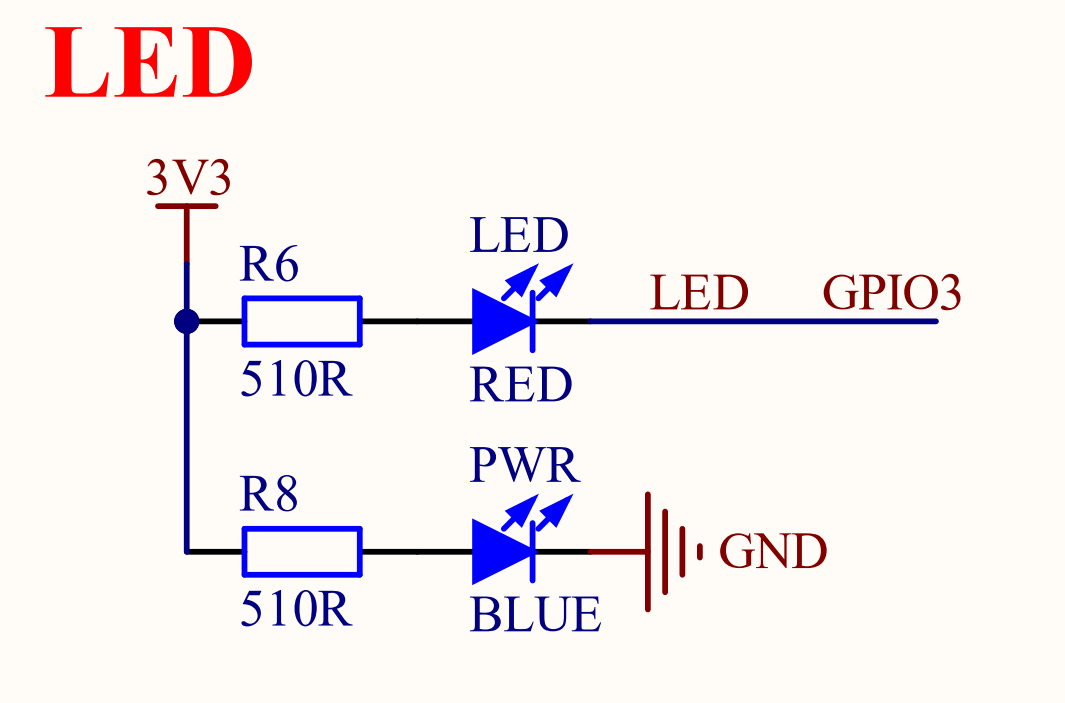
通过以上原理图可以看出,LED灯对应的GPIO编号为GPIO3,当GPIO输出低电平时LED亮起,GPIO输出高电平时LED熄灭。
实验代码
from machine import Pin
import time
led = Pin(3, Pin.OUT)
# 设置输出为高
led.value(1)
# pin.on()
# pin.high()
# 设置输出为低
led.value(0)
# pin.off()
# pin.low()
while True:
# 设置LED对应的GPIO对象输出对应的高低电平
led.value(1)
time.sleep_ms(500)
led.value(0)
time.sleep_ms(500)
可以看到,首先通过Pin构造函数构造了GPIO对象,初始化GPIO3并设置为输出模式,可通过value函数设置GPIO3输出高电平或者低电平,最后在一个循环中轮流设置GPIO对象输出高电平或低电平并延时一段时间,从而能看到板载的LED灯亮起、熄灭,实现交替闪烁的效果。
运行验证
将DNRP2350AM开发板连接到Thonny,然后添加需要运行的实验例程,并点击Thonny左上角的“运行当前脚本”绿色按钮后,可以看到板载的LED灯依次亮起、熄灭,实现闪烁的效果,这与理论推断的结果一致。