UART实验
前言
本章将介绍使用串口进行数据的收发操作,实现RP2350A与上位机软件的串口通信的功能,通过本章的学习,读者将学习到如何使用MicroPython使用RP2350A的UART通讯功能。
串口简介
学习串口前,我们先来了解一下数据通信的一些基础概念。
数据通信的基础概念
在单片机的应用中,数据通信是必不可少的一部分,比如:单片机和上位机、单片机和外围器件之间,它们都有数据通信的需求。由于设备之间的电气特性、传输速率、可靠性要求各不相同,于是就有了各种通信类型、通信协议,我们最常的有:USART、IIC、SPI、CAN、USB等。
1,数据通信方式
按数据通信方式分类,可分为串行通信和并行通信两种。串行和并行的对比如下图所示:
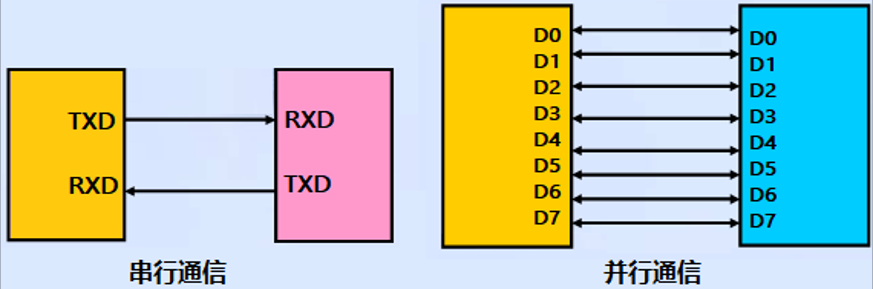
串行通信的基本特征是数据逐位顺序依次传输,��优点是传输线少、布线成本低、灵活度高等优点,一般用于近距离人机交互,特殊处理后也可以用于远距离,缺点就是传输速率低。
而并行通信是数据各位可以通过多条线同时传输,优点是传输速率高,缺点就是布线成本高,抗干扰能力差因而适用于短距离、高速率的通信。
2,数据传输方向
根据数据传输方向,通信又可分为全双工、半双工和单工通信。全双工、半双工和单工通信的比较如下图所示:
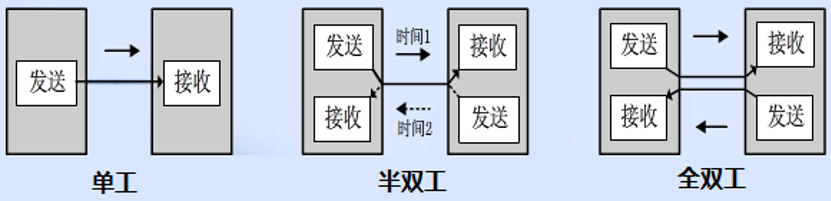
单工是指数据传输仅能沿一个方向,不能实现反方向传输,如校园广播。
半双工是指数据传输可以沿着两个方向,但是需要分时进行,如对讲机。
全双工是指数据可以同时进行双向传输,日常的打电话属于这种情形。
这里注意全双工和半双工通信的区别:半双工通信是共用一条线路实现双向通信,而全双工是利用两条线路,一条用于发送数据,另一条用于接收数据。
3,数据同步方式
根据数据同步方式,通信又可分为同步通信和异步通信。同步通信和异步通信比较如下图所示:
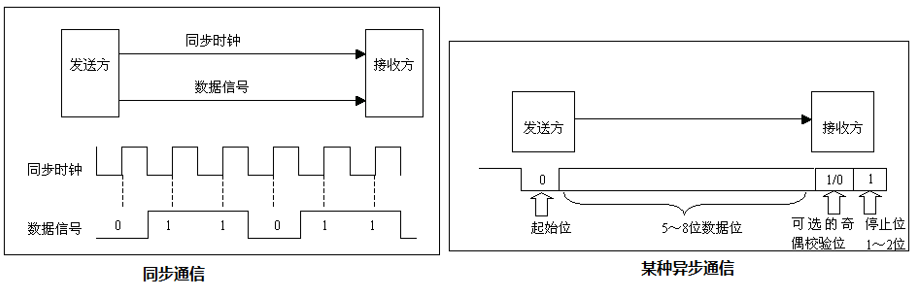
同步通信要求通信双方共用同�一时钟信号,在总线上保持统一的时序和周期完成信息传输。优点:可以实现高速率、大容量的数据传输,以及点对多点传输。缺点:要求发送时钟和接收时钟保持严格同步,收发双方时钟允许的误差较小,同时硬件复杂。
异步通信不需要时钟信号,而是在数据信号中加入开始位和停止位等一些同步信号,以便使接收端能够正确地将每一个字符接收下来,某些通信中还需要双方约定传输速率。优点:没有时钟信号硬件简单,双方时钟可允许一定误差。缺点:通信速率较低,只适用点对点传输。
4,通信速率
在数字通信系统中,通信速率(传输速率)指数据在信道中传输的速度,它分为两种:传信率和传码率。
传信率:每秒钟传输的信息量,即每秒钟传输的二进制位数,单位为bit/s(即比特每秒),因而又称为比特率。
传码率:每秒钟传输的码元个数,单位为Baud(即波特每秒),因而又称为波特率。
另外,比特率和波特率也是有一定的关系的。
比特率和波特率的关系可以用以下式子表示:比特率 = 波特率 * log2M,其中M表示码元承载的信息量。我们也可以理解M为码元的进制数。
UART模块介绍
概述
UART实现标准的UART/USART双工�串行通信协议。RP2350A内部包含两个UART硬件模块,每个 UART 都可以连接到多个 GPIO 引脚,详细内容请参照数据手册中的第 9.4 节的 GPIO 多路复用表。
API描述
UART类位于machine模块下
构造函数
uart = UART(id, baudrate=115200, tx=Pin(0), rx=Pin(1))
【参数】
- id:UART号,有效值 [0,1]
- baudrate:UART波特率,可选参数,默认115200
- tx:发送数据的引脚号
- rx:接收数据的引脚号
read
UART.read([nbytes])
读取字符。若指定nbytes,则最多读取该数量的字节。否则可读取尽可能多的数据。
【参数】
- nbytes:最多读取nbytes字节,可选参数
【返回值】
一个包括读入字节的字节对象
write
UART.write(buf)
将字节缓冲区写入UART。
【参数】
- buf:一个buffer对象
【返回值】
写入的字节数
any
UART.any()
计算可以在不阻塞的情况下读取的字符数。
【参数】
无
【返回值】
返回一个整数,如果没有可用的字符,它将返回0;如果有字符,它将返回一个正数。
更多用法请阅读MicroPython官方API手册:
https://docs.micropython.org/en/latest/library/machine.UART.html#machine-uart
硬件设计
例程功能
- 返回串口接收到的数据
- 每间隔一定时间,串口发送一段提示信息
- LED闪烁,提示程序正在运行
硬件资源
-
LED
LED - GPIO3
-
uart0:(UART0_TX、UART0_RX连接至板载USB转串口芯片上
UART0_TX - GPIO0
UART0_RX - GPIO1
原理图
板载的USB转串口芯片的USB接口通过板载的USB UART端口引出,其原理图如下图所示:
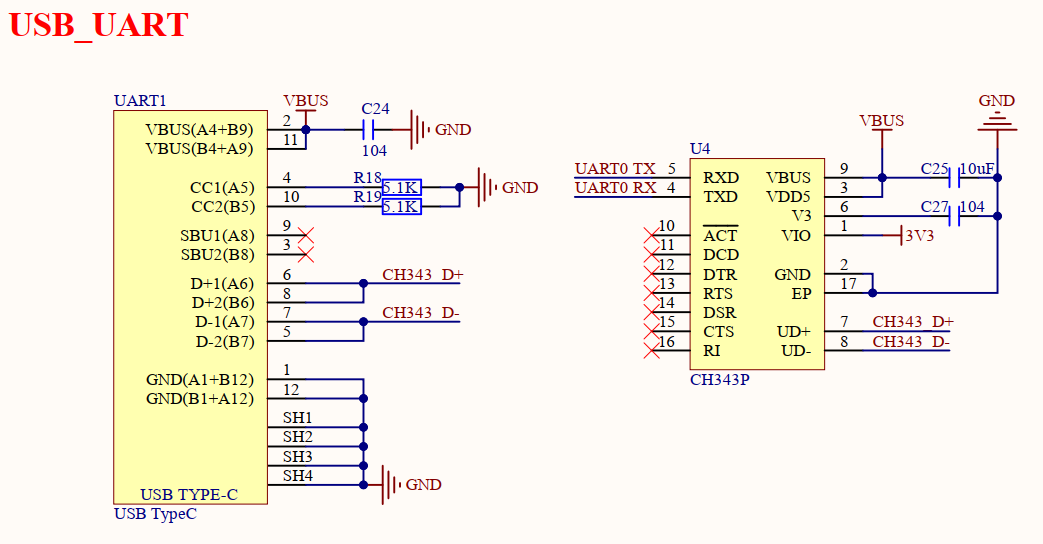
从以上原理图可以看出,TXD引脚和RXD引脚分别作为发送和接收引脚分别与USB转串口芯片的接收和发送引脚进行连接,USB转串口芯片再通过一对USB差分信号连接至USB UART的接口,这样一来,RP2350A就可以通过USB与PC上位机软件进行串口通信了。另外RP2350A有两个串口,即 uart0、uart1。
实验代码
from machine import Pin,UART
import time
"""
* @brief 程序入口
* @param 无
* @retval 无
"""
if __name__ == '__main__':
times = 0
led = Pin(3, Pin.OUT)
uart = UART(0, baudrate=115200, tx=Pin(0), rx=Pin(1))
while True:
if uart.any():
data = uart.read(128) # 接收128个字符
uart.write('Received data: {}'.format(data.decode()))
else:
times+=1
if (times % 200) == 0:
uart.write('ATK-DNPR2350 Board Serial Port Experiment\r\n') # 发送一条数据
elif (times % 50) == 0:
uart.write('Please enter data\r\n') # 发送一条数据
elif (times % 30) == 0:
led.toggle()
time.sleep_ms(1)
本实验非常简单,首先构建一个LED对象和一个UART对象,在一个循环中用any()函数判断是否接受到数据,倘若接收到数据,则使用read()函数读取数据,并将读取的数据再次通过write()函数发出。如果未接收到数据,则每隔一段时间通过uart0打印一段提示信息和LED灯翻转一次。
运行验证
将DNRP2350AM开发板连接到Thonny,然后添加需要运行的实验例程,并点击Thonny左上角的“运行当前脚本”绿色按钮后,此时,可以看到开发板上的LED灯闪烁,然后我们打开串口调试助手XCOM V2.7,然后将开发板的UART接口通过USB连接电脑,连接对应的串口端口,便可与XCOM上位机通信了,如下图所示:
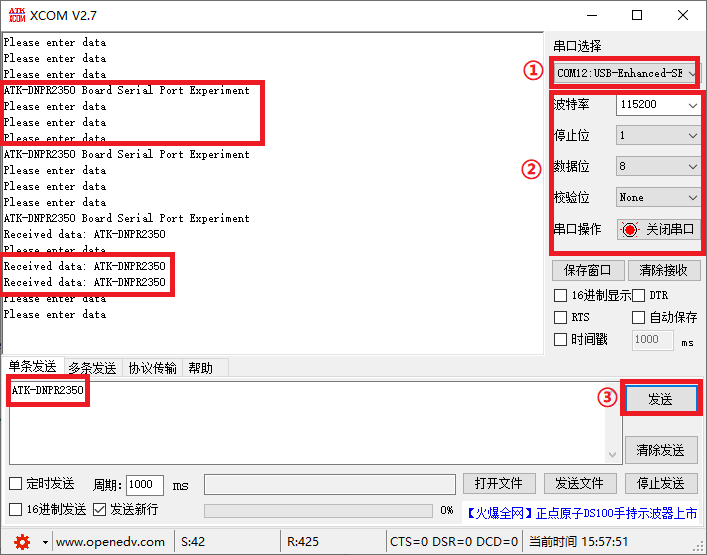
①串口端口号:根据你的电脑实际选择
②务必保持一致
③XCOM上位机发送数据按钮
可以看到,上位机连接端口后,RP2350A开发板会每隔一段时间发送一段提示信息,当我们通过上位�机往RP2350A发送数据时,上位机收到你刚发送的信息,这与理论推断的结果一致。