摄像头实验
前言
本章实验将介绍如何使用TuyaOpen让T5驱动camera(OV2640),并把图像显示在LCD上。
操作流程
使用camera组件,需要打开camera的使能宏,操作如下:
tos.py config menu
然后到configure device driver中使能camera。

还需要选择对应的摄像头,OV2640。

记得最后要保存。
方便快捷直接使用 tos.py config choice命令选择生成好的配置文件。
摄像头驱动介绍
概述
TuyaOpen CAMERA 组件是一个高度抽象化的统一管理接口,旨在解决不同型号摄像头在硬件能力、通信协议和数据格式上的差异。它为上层应用提供了一套标准化的API,从而实现对各类摄像头设备的无缝接入、功能调用和集中管控。
API 描述
1,tdl_camera_find_dev函数
查找摄像头设备。
TDL_CAMERA_HANDLE_T tdl_camera_find_dev(char *name);
1.1 参数描述
name:摄像头名称
1.2 返回值
OPRT_OK表示解码成功,其他表示解码失败。
2,tdl_camera_dev_open函数
打开摄像头设备。
OPERATE_RET tdl_camera_dev_open(TDL_CAMERA_HANDLE_T camera_hdl, TDL_CAMERA_CFG_T *cfg);
2.1 参数描述
camera_hdl:摄像头句柄
cfg:参数配置。
/* 摄像头输出格式类型 */
typedef enum {
TDL_CAMERA_FMT_YUV422 = 1,
TDL_CAMERA_FMT_JPEG = ENCODED_SHIFT(1),
TDL_CAMERA_FMT_H264 = ENCODED_SHIFT(2),
TDL_CAMERA_FMT_JPEG_YUV422_BOTH = (TDL_CAMERA_FMT_JPEG | TDL_CAMERA_FMT_YUV422),
TDL_CAMERA_FMT_H264_YUV422_BOTH = (TDL_CAMERA_FMT_H264 | TDL_CAMERA_FMT_YUV422),
} TDL_CAMERA_FMT_E;
typedef OPERATE_RET (*TDL_CAMERA_GET_FRAME_CB)(TDL_CAMERA_HANDLE_T hdl, TDL_CAMERA_FRAME_T *frame);
typedef struct {
uint16_t fps; /* 输出帧率 */
uint16_t width; /* 输出宽度 */
uint16_t height; /* 输出高度 */
TDL_CAMERA_FMT_E out_fmt; /* 输出格式 */
TDL_CAMERA_GET_FRAME_CB get_frame_cb; /* 回调解码函数 */
TDL_CAMERA_GET_FRAME_CB get_encoded_frame_cb; /* 图像编码回调函数 */
}TDL_CAMERA_CFG_T;
2.2 返回值
OPRT_OK表示成功,其他表示失败。
3,tkl_dma2d_init函数
DMA2D初始化。
OPERATE_RET tkl_dma2d_init(CONST TUYA_DMA2D_BASE_CFG_T *cfg);
3.1 参数描述
cfg:DMA2D基础配置
typedef VOID_T (*TUYA_DMA2D_IRQ_CB)(TUYA_DMA2D_IRQ_E type, VOID_T *args);
/**
* @brief dma2d interrupt config
*/
typedef struct {
TUYA_DMA2D_IRQ_CB cb; /* DMA2D回调函数 */
VOID_T *arg; /* DMA2D回调函数传入参数 */
} TUYA_DMA2D_BASE_CFG_T;
3.2 返回值:
OPRT_OK表示成功,其他表示失败。
4,tkl_dma2d_convert函数
格式转换。
OPERATE_RET tkl_dma2d_convert(TKL_DMA2D_FRAME_INFO_T *src, TKL_DMA2D_FRAME_INFO_T *dst);
4.1 参数描述
src:源图像数据
dst:目标图像输出配置参数
typedef struct
{
UINT16_T x_axis;
UINT16_T y_axis;
}TKL_DMA2D_POINT_T;
typedef struct
{
TUYA_FRAME_FMT_E type; /* 转换类型 */
uint8_t *pbuf; /* 转转后存储的地址 */
UINT16_T width; /* 宽度 */
UINT16_T height; /* 高度 */
TKL_DMA2D_POINT_T axis; /* 坐标偏移 */
UINT16_T width_cp;
UINT16_T height_cp;
}TKL_DMA2D_FRAME_INFO_T;
4.2 返回值:
OPRT_OK表示成功,其他表示失败。
5,tkl_dma2d_convert函数
是否需要两个字节转换。
OPERATE_RET tdl_disp_dev_rgb565_swap(uint16_t *data, uint32_t len);
5.1 参数描述
data:需要转换的数据
len:需要转换的大小(像素的个数)
5.2 返回值:
OPRT_OK��表示成功,其他表示失败。
硬件设计
例程功能
1,测试摄像头驱动,并把图像显示在LCD上。
硬件资源
1,RGBLCD
LCD_R3: P23
LCD_R4: P22
LCD_R5: P21
LCD_R6: P20
LCD_R7: P19
LCD_G2: P42
LCD_G3: P41
LCD_G4: P40
LCD_G5: P26
LCD_G6: P25
LCD_G7: P24
LCD_B3: P47
LCD_B4: P46
LCD_B5: P45
LCD_B6: P44
LCD_B7: P43
LCD_PCLK: P14
LCD_DE: P16
LCD_BL: P9
LCD_RST: P27
2,SPILCD
DC/WR: P42
RST: P43
CS: P45
SCK: P44
SDA: P46
BL/PWR: P9
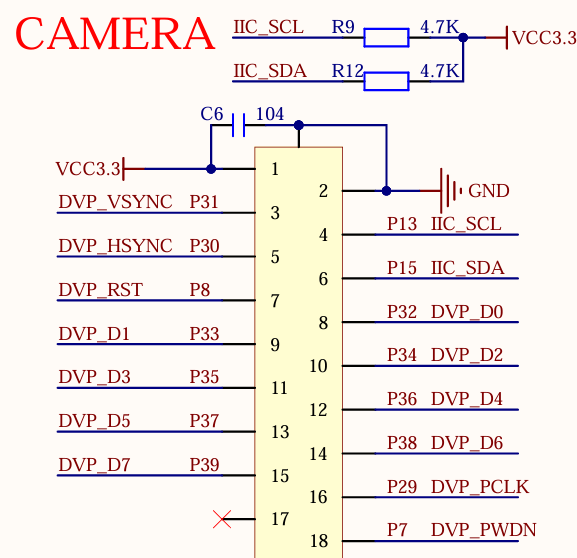
3,CAMERA
DVP_VSYNC:P31
DVP_HSYNC:P30
DVP_RST:P8
DVP_D0:P32
DVP_D1:P33
DVP_D2:P34
DVP_D3:P35
DVP_D4:P36
DVP_D5:P37
DVP_D6:P38
DVP_D7:P39
DVP_PCLK:P29
DVP_PWDN:P7
IIC_SCL:P13
IIC_SDA:P15
原理图
正点原子T5 AI开发板上CAMERA的连接原理图,如下图所示。
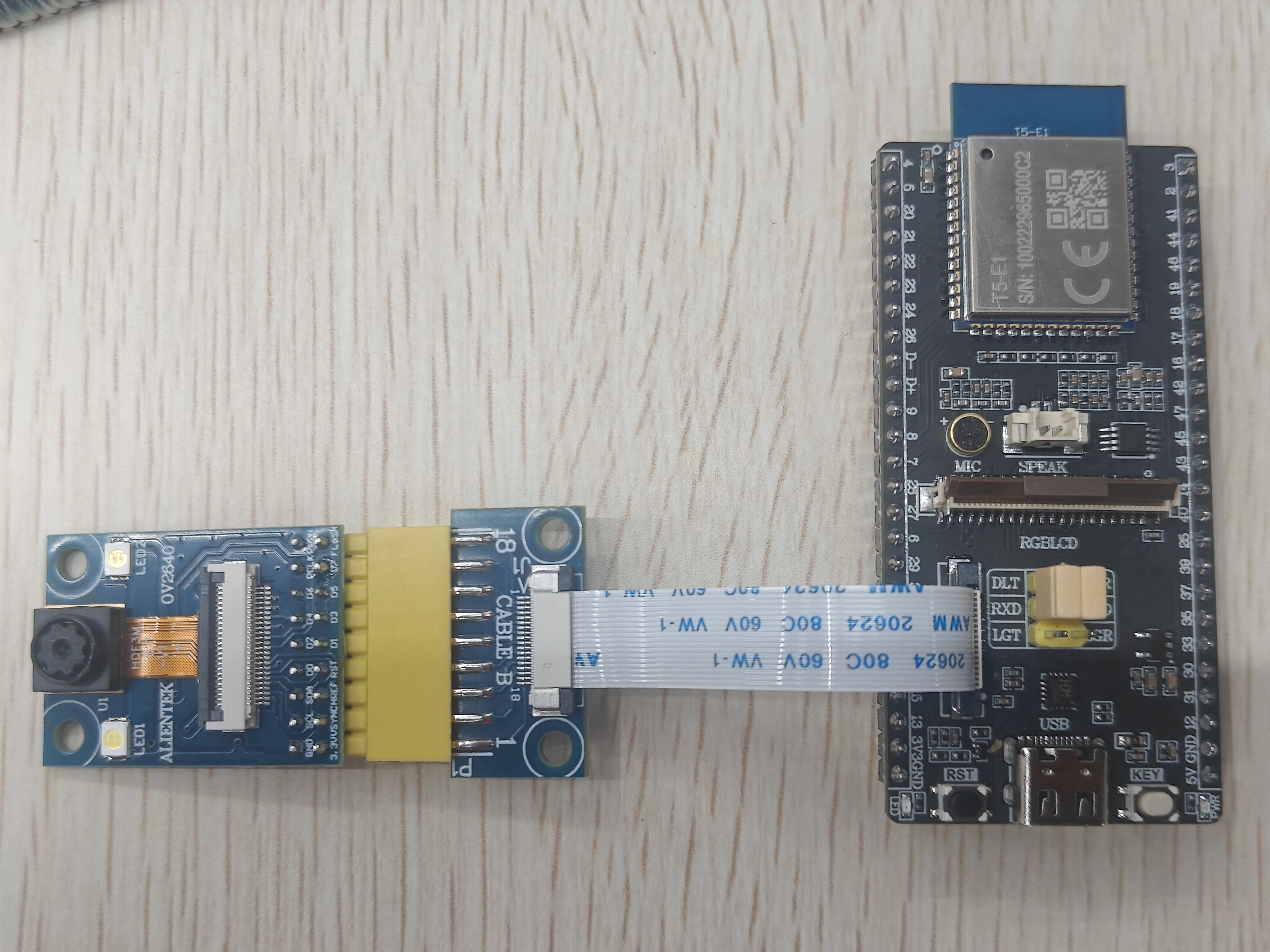
摄像头接线图如下所示。
程序设计
1,CAMERA驱动代码
这里我们只讲解核心代码,详细的源码请大家参考光盘资料本实验对应的源码。CAMERA驱动源码包括两个文件:camera.c和camera.h
camera.h文件是对函数声明。
/* Function Declaration */
OPERATE_RET camera_init(void);
camera.c文件是对摄像头初始化且完成摄像头数据显示在屏幕上的操作。
#if defined(ATK_T5AI_MINI_BOARD_LCD_MD0700R_RGB)
#define CAMERA_FPS 20
#define CAMERA_WIDTH 480
#define CAMERA_HEIGHT 480
#else
#define CAMERA_FPS 40
#define CAMERA_WIDTH 240
#define CAMERA_HEIGHT 240
#endif
extern TDL_DISP_HANDLE_T sg_tdl_disp_hdl;
extern TDL_DISP_FRAME_BUFF_T *sg_p_display_fb;
extern TDL_DISP_DEV_INFO_T sg_display_info;
static TDL_CAMERA_HANDLE_T sg_tdl_camera_hdl = NULL;
#if defined(ENABLE_DMA2D) && (ENABLE_DMA2D == 1)
static TKL_DMA2D_FRAME_INFO_T sg_in_frame = {0};
static TKL_DMA2D_FRAME_INFO_T sg_out_frame = {0};
static SEM_HANDLE sg_convert_sem;
#endif
/**
* @brief camera frame callback
* @param[in] hdl:camera handle
* @param[in] frame:camera frame
* @return OPERATE_RET
*/
OPERATE_RET __get_camera_raw_frame_cb(TDL_CAMERA_HANDLE_T hdl, TDL_CAMERA_FRAME_T *frame)
{
(void)hdl;
#if defined(ENABLE_DMA2D) && (ENABLE_DMA2D == 1)
/* Calculate offset to center camera image on screen */
int x_offset = (sg_p_display_fb->width - CAMERA_WIDTH) / 2;
int y_offset = (sg_p_display_fb->height - CAMERA_HEIGHT) / 2;
/* Input frame: YUV422 from camera */
sg_in_frame.type = TUYA_FRAME_FMT_YUV422;
sg_in_frame.width = CAMERA_WIDTH;
sg_in_frame.height = CAMERA_HEIGHT;
sg_in_frame.axis.x_axis = 0;
sg_in_frame.axis.y_axis = 0;
sg_in_frame.width_cp = CAMERA_WIDTH;
sg_in_frame.height_cp = CAMERA_HEIGHT;
sg_in_frame.pbuf = frame->data;
/* Output frame: RGB565 to display buffer (centered) */
sg_out_frame.type = TUYA_FRAME_FMT_RGB565;
sg_out_frame.width = sg_p_display_fb->width;
sg_out_frame.height = sg_p_display_fb->height;
sg_out_frame.axis.x_axis = x_offset > 0 ? x_offset : 0;
sg_out_frame.axis.y_axis = y_offset > 0 ? y_offset : 0;
sg_out_frame.width_cp = CAMERA_WIDTH;
sg_out_frame.height_cp = CAMERA_HEIGHT;
sg_out_frame.pbuf = sg_p_display_fb->frame;
tkl_dma2d_convert(&sg_in_frame, &sg_out_frame); /* convert yuv422 to rgb565 */
tal_semaphore_wait_forever(sg_convert_sem); /* wait dma2d convert done */
if(sg_display_info.is_swap)
{
tdl_disp_dev_rgb565_swap((uint16_t *)sg_p_display_fb->frame, sg_p_display_fb->len/2); /* swap rgb565 */
}
tdl_disp_dev_flush(sg_tdl_disp_hdl, sg_p_display_fb); /* display frame */
#endif
return OPRT_OK;
}
#if defined(ENABLE_DMA2D) && (ENABLE_DMA2D == 1)
/**
* @brief dma2d irq callback
* @param[in] type:irq type
* @param[in] args: args
* @return none
*/
static void __dma2d_irq_cb(TUYA_DMA2D_IRQ_E type, VOID_T *args)
{
(void)type;
(void)args;
if(sg_convert_sem) {
tal_semaphore_post(sg_convert_sem);
}
}
/**
* @brief dma2d init
* @param[in] None
* @return none
*/
static OPERATE_RET __dma2d_init(void)
{
OPERATE_RET rt = OPRT_OK;
TUYA_CALL_ERR_RETURN(tal_semaphore_create_init(&sg_convert_sem, 0, 1)); /* create semaphore */
TUYA_DMA2D_BASE_CFG_T dma2d_cfg = {
.cb = __dma2d_irq_cb,
.arg=NULL,
};
return tkl_dma2d_init(&dma2d_cfg); /* init dma2d */
}
#endif
/**
* @brief camera init
* @param[in] None
* @retval OPRT_OK:success
*/
OPERATE_RET camera_init(void)
{
OPERATE_RET rt = OPRT_OK;
TDL_CAMERA_CFG_T cfg;
#if defined(ENABLE_DMA2D) && (ENABLE_DMA2D == 1)
TUYA_CALL_ERR_LOG(__dma2d_init());
#endif
sg_tdl_camera_hdl = tdl_camera_find_dev(CAMERA_NAME); /* Find camera device */
if(NULL == sg_tdl_camera_hdl) {
PR_ERR("camera dev %s not found", CAMERA_NAME);
return OPRT_NOT_FOUND;
}
/* Camera configuration */
cfg.fps = CAMERA_FPS;
cfg.width = CAMERA_WIDTH;
cfg.height = CAMERA_HEIGHT;
cfg.out_fmt = TDL_CAMERA_FMT_YUV422;
cfg.get_frame_cb = __get_camera_raw_frame_cb;
TUYA_CALL_ERR_RETURN(tdl_camera_dev_open(sg_tdl_camera_hdl, &cfg)); /* Open camera device */
return OPRT_OK;
}
上述源码中,camera_init函数用来初始化摄像头,然后__get_camera_raw_frame_cb函数用来更新图像数据到屏幕上,还有dma2d使能的一些函数。
2,CMakeLists.txt文件
CMakeLists.txt文件配置内容如下。
# Add Driver
set(src_dirs
TFTLCD # 添加驱动组件
CAMERA
)
foreach(dir ${src_dirs})
set(SRC_DIR ${APP_PATH}/components/BSP/${dir})
aux_source_directory(${SRC_DIR} DRIVE_SRC)
target_sources(${EXAMPLE_LIB}
PRIVATE
${DRIVE_SRC}
)
target_include_directories(${EXAMPLE_LIB}
PRIVATE
${SRC_DIR}
)
endforeach()
3,main.c驱动代码
在main.c里面编写如下代码。
#include "tal_api.h"
#include "tkl_output.h"
#include "board_com_api.h"
#include "tftlcd.h"
#include "camera.h"
/**
* @brief user_main
*
* @param[in] param:Task parameters
* @return none
*/
void user_main(void)
{
tal_log_init(TAL_LOG_LEVEL_DEBUG, 1024, (TAL_LOG_OUTPUT_CB)tkl_log_output); /* Initialize log output */
tdd_disp_atk_tftlcd_register(); /* Register the TFTLCD LCD display */
tftlcd_show_string(30, 50, 200, 16, 16, "T5 MINI Board", RED);
tftlcd_show_string(30, 70, 200, 16, 16, "CAMERA TEST", RED);
tftlcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);
camera_init();
while(1)
{
tal_system_sleep(1000);
}
}
/**
* @brief main
*
* @param argc
* @param argv
* @return none
*/
#if OPERATING_SYSTEM == SYSTEM_LINUX
void main(int argc, char *argv[])
{
user_main();
while (1) {
tal_system_sleep(500);
}
}
#else
/**
* @brief main
* @param[in] None
* @return none
*/
void tuya_app_main(void)
{
user_main();
}
#endif
从user_main函数可以看到,首先初始化屏幕,后面初始化摄像头。
运行验证
程序下载完成后,LCD上显示摄像头图像。