PWM实验
前言
��本章实验将介绍如何使用TuyaOpen让T5控制板载的LED实现呼吸灯的效果。
PWM模块介绍
概述
PWM(Pulse Width Modulation),即脉冲宽度调制,其是利用微处理器的数字输出来对模拟电路进行控制的一种有效的技术。
API 描述
1,tkl_io_pinmux_config函数
GPIO复用函数。
OPERATE_RET tkl_io_pinmux_config(TUYA_PIN_NAME_E pin, TUYA_PIN_FUNC_E pin_func);
1.1 参数描述
| 形参 | 描述 |
|---|---|
| pin | 管脚编号 |
| pin_func | 复用配置 |
pin:GPIO 引脚编号,此编号区别于芯片原始引脚号,是由涂鸦根据芯片 PA、PB ... PN 上的引脚个数顺序往下编号的:
/* TuyaOpen/tools/porting/adapter/utilities/include/tuya_cloud_types.h */
typedef enum {
TUYA_GPIO_NUM_0, /* GPIO 0 */
TUYA_GPIO_NUM_1, /* GPIO 1 */
TUYA_GPIO_NUM_2, /* GPIO 2 */
............................
TUYA_GPIO_NUM_MAX,
} TUYA_GPIO_NUM_E;
pin_func:复用配置。
/* TuyaOpen/tools/porting/adapter/utilities/include/tuya_cloud_types.h */
/**
* @brief tuya pinmux default func define
*/
#define TUYA_IIC0_SCL 0x0
#define TUYA_IIC0_SDA 0x1
#define TUYA_IIC1_SCL 0x2
#define TUYA_IIC1_SDA 0x3
#define TUYA_IIC2_SCL 0x4
#define TUYA_IIC2_SDA 0x5
#define TUYA_IIC3_SCL 0x6
#define TUYA_IIC3_SDA 0x7
#define TUYA_IIC4_SCL 0x8
#define TUYA_IIC4_SDA 0x9
#define TUYA_IIC5_SCL 0xA
#define TUYA_IIC5_SDA 0xB
#define TUYA_UART0_TX 0x100
#define TUYA_UART0_RX 0x101
#define TUYA_UART0_RTS 0x102
#define TUYA_UART0_CTS 0x103
#define TUYA_UART1_TX 0x104
#define TUYA_UART1_RX 0x105
#define TUYA_UART1_RTS 0x106
#define TUYA_UART1_CTS 0x107
#define TUYA_UART2_TX 0x108
#define TUYA_UART2_RX 0x109
#define TUYA_UART2_RTS 0x10A
#define TUYA_UART2_CTS 0x10B
#define TUYA_UART3_TX 0x10C
#define TUYA_UART3_RX 0x10D
#define TUYA_UART3_RTS 0x10E
#define TUYA_UART3_CTS 0x10F
#define TUYA_SPI0_MISO 0x200
#define TUYA_SPI0_MOSI 0x201
#define TUYA_SPI0_CLK 0x202
#define TUYA_SPI0_CS 0x203
#define TUYA_SPI1_MISO 0x204
#define TUYA_SPI1_MOSI 0x205
#define TUYA_SPI1_CLK 0x206
#define TUYA_SPI1_CS 0x207
#define TUYA_SPI2_MISO 0x208
#define TUYA_SPI2_MOSI 0x209
#define TUYA_SPI2_CLK 0x20A
#define TUYA_SPI2_CS 0x20B
#define TUYA_PWM0 0x300
#define TUYA_PWM1 0x301
#define TUYA_PWM2 0x302
#define TUYA_PWM3 0x303
#define TUYA_PWM4 0x304
#define TUYA_PWM5 0x305
#define TUYA_ADC0 0x400
#define TUYA_ADC1 0x401
#define TUYA_ADC2 0x402
#define TUYA_ADC3 0x403
#define TUYA_ADC4 0x404
#define TUYA_ADC5 0x405
#define TUYA_DAC0 0x500
#define TUYA_DAC1 0x501
#define TUYA_DAC2 0x502
#define TUYA_DAC3 0x503
#define TUYA_DAC4 0x504
#define TUYA_DAC5 0x505
#define TUYA_I2S0_SCK 0x600
#define TUYA_I2S0_WS 0x601
#define TUYA_I2S0_SDO_0 0x602
#define TUYA_I2S0_SDI_0 0x603
#define TUYA_I2S1_SCK 0x604
#define TUYA_I2S1_WS 0x605
#define TUYA_I2S1_SDO_0 0x606
#define TUYA_I2S1_SDI_0 0x607
1.2 返回值
OPRT_OK表示成功。关于其他错误,请参考tuya_error_code.h。
2,tkl_pwm_init函数
PWM初始化。
OPERATE_RET tkl_pwm_init(TUYA_PWM_NUM_E ch_id, CONST TUYA_PWM_BASE_CFG_T *cfg);
2.1 参数描述
ch_id:通道号(请参考对应的管脚来配置PWM通道)
/* TuyaOpen/tools/porting/adapter/utilities/include/tuya_cloud_types.h */
/**
* @brief PWM flag
*
*/
typedef enum {
TUYA_PWM_NUM_0, /* PWM 0 */
TUYA_PWM_NUM_1, /* PWM 1 */
TUYA_PWM_NUM_2, /* PWM 2 */
TUYA_PWM_NUM_3, /* PWM 3 */
TUYA_PWM_NUM_4, /* PWM 4 */
TUYA_PWM_NUM_5, /* PWM 5 */
TUYA_PWM_NUM_MAX,
} TUYA_PWM_NUM_E;
cfg:PWM基础配置,包含输出极性,占空比,频率。
/* TuyaOpen/tools/porting/adapter/utilities/include/tuya_cloud_types.h */
/**
* @brief pwm config
*/
typedef struct {
TUYA_PWM_POLARITY_E polarity; /* 极性 */
TUYA_PWM_COUNT_E count_mode; /* PWM计数方式 */
/* pulse duty cycle = duty / cycle; exp duty = 5000,cycle = 10000; pulse duty cycle = 50% */
uint32_t duty; /* 占空比 */
uint32_t cycle; /* 周期 */
uint32_t frequency; /* 频率 */
} TUYA_PWM_BASE_CFG_T;
/**
* @brief pwm polarity
*/
typedef enum {
TUYA_PWM_NEGATIVE = 0, /* 阴极 */
TUYA_PWM_POSITIVE, /* 阳极 */
} TUYA_PWM_POLARITY_E;
/**
* @brief pwm count mode
*/
typedef enum {
TUYA_PWM_CNT_UP = 0, /* 向上计数 */
TUYA_PWM_CNT_UP_AND_DOWN, /* 可在双工互补模式下使用 */
} TUYA_PWM_COUNT_E;
2.2 返回值
OPRT_OK表示成功。关于其他错误,请参考tuya_error_code.h。
3,tkl_pwm_start函数
开启PWM。
OPERATE_RET tkl_pwm_start(TUYA_PWM_NUM_E ch_id);
3.1 参数描述
ch_id:通道号(请参考对应的管脚来配置PWM通道)
3.2 返回值:
OPRT_OK表示成功。关于其他错误,请参考tuya_error_code.h。
4,tkl_pwm_stop函数
停止PWM。
OPERATE_RET tkl_pwm_stop(TUYA_PWM_NUM_E ch_id);
4.1 参数描述
ch_id:通道号(请参考对应的管脚来配置PWM通道)
4.2 返回值:
OPRT_OK表示成功。关于其他错误,请参考tuya_error_code.h。
5,tkl_pwm_duty_set函数
设置PWM占空比。
OPERATE_RET tkl_pwm_duty_set(TUYA_PWM_NUM_E ch_id, UINT32_T duty);
5.1 参数描述
ch_id:通道号(请参考对应的管脚来配置PWM通道)
duty:设置占空比
5.2 返回值:
OPRT_OK表示成功。关于其他错误,请参考tuya_error_code.h。
本实验涉及了上述PWM函数,其他相关函数将在后续章节中结合具体应用进行详细介绍。
硬件设计
例程功能
1,利用PWM原理,实现呼吸灯实验。
硬件资源
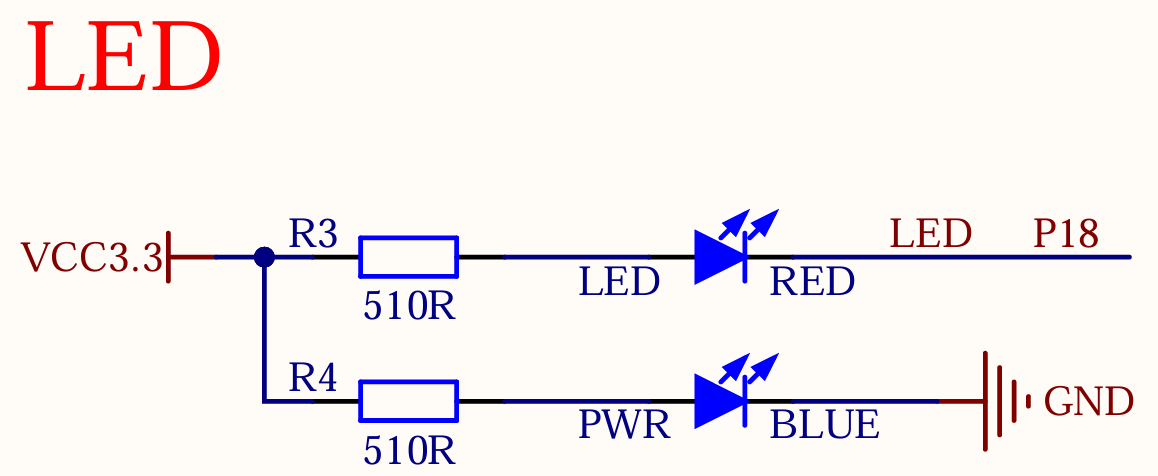
1,LED
LED - P18
2,PWM
PWM - PWM0(P18)
原理图
正点原子T5 AI开发板上LED的连接原理图,如下图所示。
程序设计
1,PWM驱动代码
这里我们只讲解核心代码,详细的源码请大家参考光盘资料本实验对应的源码。PWM驱动源码包括两个文件:pwm.c和pwm.h
pwm.h文件是对PWM引脚做了相关定义以及函数声明。
#define PWM_DUTY 0 /* 0% duty */
#define PWM_FREQUENCY 1000 /* 1kHz frequency */
#define TASK_PWM_PRIORITY THREAD_PRIO_2 /* Task priority for PWM thread */
#define TASK_PWM_SIZE 4096 /* Stack size for PWM task */
#define PWM_ID TUYA_PWM_NUM_0 /* PWM ID for the first PWM channel */
/* Function Declaration */
void pwm_init(void); /* Function to initialize the PWM */
void pwm_set_duty(uint32_t duty); /* Function to set the PWM duty cycle */
pwm.c文件是对P18管脚进行PWM复用和初始化。
/**
* @brief PWM initialization
* @param[in] none
* @return none
*/
void pwm_init(void)
{
OPERATE_RET rt = OPRT_OK;
tkl_io_pinmux_config(TUYA_GPIO_NUM_18, TUYA_PWM0);
/*pwm init*/
TUYA_PWM_BASE_CFG_T pwm_cfg = {
.duty = PWM_DUTY, /* 1-10000 */
.frequency = PWM_FREQUENCY, /* 1kHz */
.polarity = TUYA_PWM_NEGATIVE, /* Polarity of the PWM signal */
};
TUYA_CALL_ERR_LOG(tkl_pwm_init(PWM_ID, &pwm_cfg));
/*start PWM*/
TUYA_CALL_ERR_LOG(tkl_pwm_start(PWM_ID));
}
/**
* @brief Set PWM duty cycle
* @param[in] duty: Duty cycle value (0-10000, where 5000 is 50%)
* @return none
*/
void pwm_set_duty(uint32_t duty)
{
OPERATE_RET rt = OPRT_OK;
TUYA_CALL_ERR_LOG(tkl_pwm_duty_set(PWM_ID, duty)); /* Set the duty cycle */
TUYA_CALL_ERR_LOG(tkl_pwm_start(PWM_ID)); /* Restart PWM to apply the new duty cycle */
}
上述源码中,pwm_init函数用来配置P18为PWM复用管脚和初始化PWM,然后pwm_set_duty函数用来更新占用比。
2,CMakeLists.txt文件
CMakeLists.txt文件配置内容如下。
# Add Driver
set(src_dirs
LED # 添加驱动组件
PWM
)
foreach(dir ${src_dirs})
set(SRC_DIR ${APP_PATH}/components/BSP/${dir})
aux_source_directory(${SRC_DIR} DRIVE_SRC)
target_sources(${EXAMPLE_LIB}
PRIVATE
${DRIVE_SRC}
)
target_include_directories(${EXAMPLE_LIB}
PRIVATE
${SRC_DIR}
)
endforeach()
3,main.c驱动代码
在main.c里面编写如下代码。
#include "tal_api.h"
#include "tkl_output.h"
#include "tal_cli.h"
#include "pwm.h"
/**
* @brief user_main
*
* @param[in] none
* @return none
*/
void user_main(void)
{
uint8_t dir = 1; /* Direction flag: 1 for increasing, 0 for decreasing */
uint16_t ledpwmval = 0; /* Initial PWM value */
tal_log_init(TAL_LOG_LEVEL_DEBUG, 1024, (TAL_LOG_OUTPUT_CB)tkl_log_output); /* Initialize log output */
pwm_init(); /* Initialize PWM */
while (1) {
tal_system_sleep(100); /* Sleep for 100 ms */
if (dir == 1)
{
ledpwmval += 5 * 100; /* Increase PWM value by 5 */
}
else
{
ledpwmval -= 5 * 100; /* Decrease PWM value by 5 */
}
if (ledpwmval > 9500)
{
dir = 0; /* Change direction to decreasing */
}
if (ledpwmval < 5)
{
dir = 1; /* Change direction to increasing */
}
pwm_set_duty(ledpwmval); /* Set the PWM duty cycle */
}
}
/**
* @brief main
*
* @param argc
* @param argv
* @return void
*/
#if OPERATING_SYSTEM == SYSTEM_LINUX
void main(int argc, char *argv[])
{
user_main();
while (1) {
tal_system_sleep(500);
}
}
#else
/**
* @brief The application entry point
* @param[in] none
* @return none
*/
void tuya_app_main(void)
{
user_main();
}
#endif
从user_main函数可以看到,每100ms周期配置输出LED灯的PWM占空比,从而实现呼吸灯的效果。
运行验证
程序下载完成后,可看到LED灯从亮到灭,后从灭到亮的转变。