UART实验
前言
本章实验将介绍如何使用TuyaOpen让T5实现UART通信,从而实现LED控制。
UART模块介绍
概述
UART(Universal Asynchronous Receiver/Transmitter) 是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输和接收。
API 描述
1,tkl_uart_init函数
UART初始化函数。
OPERATE_RET tkl_uart_init(TUYA_UART_NUM_E port_id, TAL_UART_CFG_T *cfg);
1.1 参数描述
| 形参 | 描述 |
|---|---|
| port_id | 串口端口号 |
| cfg | 串口配置 |
port_id:端口号:
/* TuyaOpen/tools/porting/adapter/utilities/include/tuya_cloud_types.h */
typedef enum {
TUYA_UART_NUM_0, // UART 0
TUYA_UART_NUM_1, // UART 1
TUYA_UART_NUM_2, // UART 2
TUYA_UART_NUM_3, // UART 3
TUYA_UART_NUM_4, // UART 4
TUYA_UART_NUM_5, // UART 5
TUYA_UART_NUM_MAX,
} TUYA_UART_NUM_E;
cfg:串口基础配置,包含波特率,奇偶校验位,停止位,流控制。
/* TuyaOpen/src/tal_driver/include/tal_uart.h */
typedef struct {
uint32_t rx_buffer_size;
#ifdef CONFIG_TX_ASYNC
uint32_t tx_buffer_size;
#endif
uint8_t open_mode;
TUYA_UART_BASE_CFG_T base_cfg;
} TAL_UART_CFG_T;
/* TuyaOpen/platform/T5AI/tuyaos/tuyaos_adapter/include/utilities/include/tuya_cloud_types.hh */
/**
* @brief uart config
*
*/
typedef struct {
UINT_T baudrate; /* 波特率 */
TUYA_UART_PARITY_TYPE_E parity; /* 奇偶校验位 */
TUYA_UART_DATA_LEN_E databits; /* 数据位 */
TUYA_UART_STOP_LEN_E stopbits; /* 停止位 */
TUYA_UART_FLOWCTRL_TYPE_E flowctrl; /* 流控制 */
} TUYA_UART_BASE_CFG_T;
/**
* @brief uart parity
*
*/
typedef enum {
TUYA_UART_PARITY_TYPE_NONE = 0, /* 无奇偶校验位 */
TUYA_UART_PARITY_TYPE_ODD = 1, /* 奇校验位 */
TUYA_UART_PARITY_TYPE_EVEN = 2, /* 偶校验位 */
} TUYA_UART_PARITY_TYPE_E;
/**
* @brief uart databits
*
*/
typedef enum {
TUYA_UART_DATA_LEN_5BIT = 0x05, /* 5位数据位 */
TUYA_UART_DATA_LEN_6BIT = 0x06, /* 6位数据位 */
TUYA_UART_DATA_LEN_7BIT = 0x07, /* 7位数据位 */
TUYA_UART_DATA_LEN_8BIT = 0x08, /* 8位数据位 */
} TUYA_UART_DATA_LEN_E;
/**
* @brief uart stop bits
*
*/
typedef enum {
TUYA_UART_STOP_LEN_1BIT = 0x01, /* 1位停止位 */
TUYA_UART_STOP_LEN_1_5BIT1 = 0x02, /* 1.5位停止位 */
TUYA_UART_STOP_LEN_2BIT = 0x03, /* 2位停止位 */
} TUYA_UART_STOP_LEN_E;
typedef enum {
TUYA_UART_FLOWCTRL_NONE = 0, /* 无流控制方案 */
TUYA_UART_FLOWCTRL_RTSCTS, /* 请求/清除发送 */
TUYA_UART_FLOWCTRL_XONXOFF, /* 暂停传输/回复传输 */
TUYA_UART_FLOWCTRL_DTRDSR, /* 数据终端准备好/数据准备好 */
} TUYA_UART_FLOWCTRL_TYPE_E;
1.2 返回值
OPRT_OK表示成功。关于其他错误,请参考tuya_error_code.h。
2,tal_uart_read函数
读取串口数据。
int tal_uart_read(TUYA_UART_NUM_E port_id, uint8_t *data, uint32_t len);
2.1 参数描述
port_id:串口端口号
data:读取数据缓存
len:读取数据大小
2.2 返回值
>=0:数据大小;< 0:读取错误。
3,tal_uart_write函数
向串口写数据。
int tal_uart_write(TUYA_UART_NUM_E port_id, const uint8_t *data, uint32_t len);
3.1 参数描述
port_id:串口端口号
data:发送数据缓存
len:发送数据大小
3.2 返回值
>=0:数据大小;< 0:读取错误。
本实验涉及了�上述UART函数,其他相关函数将在后续章节中结合具体应用进行详细介绍。
硬件设计
例程功能
1,若串口调试助手发送“LED_ON”字符串,会打开板载的LED灯,若发送“LED_OFF”,则会关闭LED灯。
硬件资源
1,LED
LED - P18
2,UART
TXD - P0
RXD - P1
原理图
正点原子T5 AI开发板上UART的连接原理图,如下图所示。
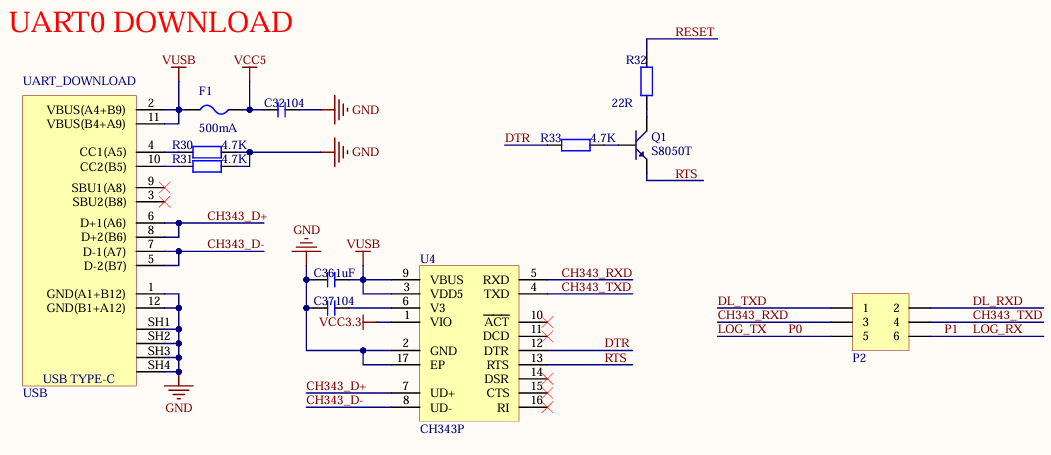
从上图可以发现,T5AI开发板的下载口与日志打印口共用一个USB转串口芯片,需要我们在P2端口进行选择,为了方便下载与调试,用户可购买USB转串口模块,一路用于下载,另一个用于日志查看。
[!IMPORTANT]
建议板载USB转串口用于下载,而日志打印口可使用外接USB转串口。
程序设计
1,UART驱动代码
这里我们只讲解核心代码,详细的源码请大家参考光盘资料本实验对应的源码。UART驱动源码包括两个文件:uart.c和uart.h
uart.h文件是对UART引脚做了相关定义以及函数声明。
/* Define the UART port number
This should match the actual UART port used for the hardware. */
#define UART_PORT_NUM TUYA_UART_NUM_0
/* Define the UART RX buffer size
This size should be sufficient for the expected data throughput. */
#define RX_BUF_SIZE 256
/* Function Declaration */
void uart_init(uint32_t baudrate); /* Initialize the uart */
uart.c文件是对串口0初始化。
/**
* @brief UART initialization
* @param[in] baudrate: Baud rate for UART communication
* @return none
*/
void uart_init(uint32_t baudrate)
{
OPERATE_RET rt = OPRT_OK;
TAL_UART_CFG_T cfg = {0};
cfg.base_cfg.baudrate = baudrate; /* Set the baud rate */
cfg.base_cfg.databits = TUYA_UART_DATA_LEN_8BIT; /* Set data bits to 8 */
cfg.base_cfg.stopbits = TUYA_UART_STOP_LEN_1BIT; /* Set stop bits to 1 */
cfg.base_cfg.parity = TUYA_UART_PARITY_TYPE_NONE; /* No parity */
cfg.rx_buffer_size = RX_BUF_SIZE; /* Set RX buffer size */
cfg.open_mode = O_BLOCK; /* Set open mode to blocking */
TUYA_CALL_ERR_LOG(tal_uart_init(UART_PORT_NUM, &cfg)); /* Initialize UART with the configuration */
}
上述源码可以看到,首先我们配置串口波特率、数据位、停止位、奇偶校验位...,然后调用tal_uart_init函数对串口0进行初始化。
2,CMakeLists.txt文件
CMakeLists.txt文件配置内容如下。
# Add Driver
set(src_dirs
LED # 添加驱动组件
UART
)
foreach(dir ${src_dirs})
set(SRC_DIR ${APP_PATH}/components/BSP/${dir})
aux_source_directory(${SRC_DIR} DRIVE_SRC)
target_sources(${EXAMPLE_LIB}
PRIVATE
${DRIVE_SRC}
)
target_include_directories(${EXAMPLE_LIB}
PRIVATE
${SRC_DIR}
)
endforeach()
3,main.c驱动代码
在main.c里面编写如下代码。
#include "tal_api.h"
#include "tkl_output.h"
#include "tal_cli.h"
#include "led.h"
#include "uart.h"
/**
* @brief user_main
*
* @param[in] none
* @return none
*/
void user_main(void)
{
uint16_t len = 0;
char data[10] = {0};
char *a = "LED_ON";
char *b = "LED_OFF";
tal_log_init(TAL_LOG_LEVEL_DEBUG, 1024, (TAL_LOG_OUTPUT_CB)tkl_log_output); /* Initialize log output */
led_init(); /* Initialize LED */
uart_init(115200); /* Initialize UART with baud rate 115200 */
while (1) {
len = tal_uart_read(UART_PORT_NUM, (uint8_t *)data, 10);
if (len > 0)
{
data[len] = '\0';
if (strcmp(a, data) == 0)
{
led_set_state(0);
}
else if (strcmp(b, data) == 0)
{
led_set_state(1);
}
tal_uart_write(UART_PORT_NUM, (const uint8_t*)data, len);
memset(data, 0, 10);
}
tal_system_sleep(10);
}
}
/**
* @brief main
*
* @param argc
* @param argv
* @return void
*/
#if OPERATING_SYSTEM == SYSTEM_LINUX
void main(int argc, char *argv[])
{
user_main();
while (1) {
tal_system_sleep(500);
}
}
#else
/**
* @brief The application entry point
* @param[in] none
* @return none
*/
void tuya_app_main(void)
{
user_main();
}
#endif
从上述源码可以看出,若接收到"LED_ON"字符串,会打开板载LED灯,若接收到”LED_OFF“,则会关闭LED灯。
运行验证
程序下载完成后,串口调试助手可根据发送的字符串来控制LED灯亮灭。