人脸检测实验
前言
在上一章节中,我们已经学习了如何在CanMV下使用CanMV AI视觉开发框架和MicroPython编程方法实现AI功能的开发。从本章开始,我们将通过人脸检测实验,介绍如何使用CanMV AI视觉开发框架和MicroPython编程实现单人或多个人脸检测功能。在本实验中,我们首先采集摄像头捕获的图像,然后经过图像预处理、模型推理和输出处理结果等一系列步骤,完成人脸检测的功能。最后,将检测结果绘制并显示在显示器上。通过本章的学习,读者将掌握如何在CanMV下使用CanMV AI视觉开发框架和MicroPython编程方法实现人脸检测功能。
AI开发框架介绍
为了简化AI开发流程并降低AI开发难度,CanMV官方针对K230D专门搭建了AI开发框架,有关AI开发框架的介绍,请见CanMV AI开发框架
硬件设计
例程功能
- 获取摄像头输出的图像,通过CanMV K230D的AI推理能力检测图像中的人脸数据,并用矩形框进行标注,最后将图像显示在LCD上。
硬件资源
- 本章实验内容主要讲解K230D的神经网络加速器KPU的使用,无需关注硬件资源。
原理图
- 本章实验内容主要讲解K230D的神经网络加速器KPU的使用,无需关注原理图。
实验代码
from libs.PipeLine import PipeLine, ScopedTiming
from libs.AIBase import AIBase
from libs.AI2D import Ai2d
import os
import ujson
from media.media import *
from media.sensor import *
from time import *
import nncase_runtime as nn
import ulab.numpy as np
import time
import utime
import image
import random
import gc
import sys
import aidemo
# 自定义人脸检测类,继承自AIBase基类
class FaceDetectionApp(AIBase):
def __init__(self, kmodel_path, model_input_size, anchors, confidence_threshold=0.5, nms_threshold=0.2, rgb888p_size=[224,224], display_size=[1920,1080], debug_mode=0):
super().__init__(kmodel_path, model_input_size, rgb888p_size, debug_mode) # 调用基类的构造函数
self.kmodel_path = kmodel_path # 模型文件路径
self.model_input_size = model_input_size # 模型输入分辨率
self.confidence_threshold = confidence_threshold # 置信度阈值
self.nms_threshold = nms_threshold # NMS(非极大值抑制)阈值
self.anchors = anchors # 锚点数据,用于目标检测
self.rgb888p_size = [ALIGN_UP(rgb888p_size[0], 16), rgb888p_size[1]] # sensor给到AI的图像分辨率,并对宽度进行16的对齐
self.display_size = [ALIGN_UP(display_size[0], 16), display_size[1]] # 显示分辨率,并对宽度进行16的对齐
self.debug_mode = debug_mode # 是否开��启调试模式
self.ai2d = Ai2d(debug_mode) # 实例化Ai2d,用于实现模型预处理
self.ai2d.set_ai2d_dtype(nn.ai2d_format.NCHW_FMT, nn.ai2d_format.NCHW_FMT, np.uint8, np.uint8) # 设置Ai2d的输入输出格式和类型
# 配置预处理操作,这里使用了pad和resize,Ai2d支持crop/shift/pad/resize/affine,具体代码请打开/sdcard/app/libs/AI2D.py查看
def config_preprocess(self, input_image_size=None):
with ScopedTiming("set preprocess config", self.debug_mode > 0): # 计时器,如果debug_mode大于0则开启
ai2d_input_size = input_image_size if input_image_size else self.rgb888p_size # 初始化ai2d预处理配置,默认为sensor给到AI的尺寸,可以通过设置input_image_size自行修改输入尺寸
top, bottom, left, right = self.get_padding_param() # 获取padding参数
self.ai2d.pad([0, 0, 0, 0, top, bottom, left, right], 0, [104, 117, 123]) # 填充边缘
self.ai2d.resize(nn.interp_method.tf_bilinear, nn.interp_mode.half_pixel) # 缩放图像
self.ai2d.build([1,3,ai2d_input_size[1],ai2d_input_size[0]],[1,3,self.model_input_size[1],self.model_input_size[0]]) # 构建预处理流程
# 自定义当前任务的后处理,results是模型输出array列表,这里使用了aidemo库的face_det_post_process接口
def postprocess(self, results):
with ScopedTiming("postprocess", self.debug_mode > 0):
post_ret = aidemo.face_det_post_process(self.confidence_threshold, self.nms_threshold, self.model_input_size[1], self.anchors, self.rgb888p_size, results)
if len(post_ret) == 0:
return post_ret
else:
return post_ret[0]
# 绘制检测结果到画面上
def draw_result(self, pl, dets):
with ScopedTiming("display_draw", self.debug_mode > 0):
if dets:
pl.osd_img.clear() # 清除OSD图像
for det in dets:
# 将检测框的坐标转换为显示分辨率下的坐标
x, y, w, h = map(lambda x: int(round(x, 0)), det[:4])
x = x * self.display_size[0] // self.rgb888p_size[0]
y = y * self.display_size[1] // self.rgb888p_size[1]
w = w * self.display_size[0] // self.rgb888p_size[0]
h = h * self.display_size[1] // self.rgb888p_size[1]
pl.osd_img.draw_rectangle(x, y, w, h, color=(255, 255, 0, 255), thickness=2) # 绘制矩形框
else:
pl.osd_img.clear()
# 获取padding参数
def get_padding_param(self):
dst_w = self.model_input_size[0] # 模型输入宽度
dst_h = self.model_input_size[1] # 模型输入高度
ratio_w = dst_w / self.rgb888p_size[0] # 宽度缩放比例
ratio_h = dst_h / self.rgb888p_size[1] # 高度缩放比例
ratio = min(ratio_w, ratio_h) # 取较小的缩放比例
new_w = int(ratio * self.rgb888p_size[0]) # 新宽度
new_h = int(ratio * self.rgb888p_size[1]) # 新高度
dw = (dst_w - new_w) / 2 # 宽度差
dh = (dst_h - new_h) / 2 # 高度差
top = int(round(0))
bottom = int(round(dh * 2 + 0.1))
left = int(round(0))
right = int(round(dw * 2 - 0.1))
return top, bottom, left, right
if __name__ == "__main__":
# 显示模式,默认"lcd"
display_mode="lcd"
display_size=[640,480]
# 设置模型路径和其他参数
kmodel_path = "/sdcard/examples/kmodel/face_detection_320.kmodel"
# 其它参数
confidence_threshold = 0.5
nms_threshold = 0.2
anchor_len = 4200
det_dim = 4
anchors_path = "/sdcard/examples/utils/prior_data_320.bin"
anchors = np.fromfile(anchors_path, dtype=np.float)
anchors = anchors.reshape((anchor_len, det_dim))
rgb888p_size = [640, 360]
# 初始化PipeLine,用于图像处理流程
sensor = Sensor(width=1280, height=960) # 构建摄像头对象
pl = PipeLine(rgb888p_size=rgb888p_size, display_size=display_size, display_mode=display_mode)
pl.create(sensor=sensor) # 创建PipeLine实例
# 初始化自定义人脸检测实例
face_det = FaceDetectionApp(kmodel_path, model_input_size=[320, 320], anchors=anchors, confidence_threshold=confidence_threshold, nms_threshold=nms_threshold, rgb888p_size=rgb888p_size, display_size=display_size, debug_mode=0)
face_det.config_preprocess() # 配置预处理
try:
while True:
os.exitpoint() # 检查是否有退出信号
with ScopedTiming("total",1):
img = pl.get_frame() # 获取当前帧数据
res = face_det.run(img) # 推理当前帧
# 当检测到人脸时,打印结果
# if res:
# print(res)
face_det.draw_result(pl, res) # 绘制结果
pl.show_image() # 显示结果
gc.collect() # 垃圾回收
except Exception as e:
sys.print_exception(e) # 打印异常信息
finally:
face_det.deinit() # 反初始化
pl.destroy() # 销毁PipeLine实例
可以看到首先是定义显示模式、图像大小、模型相关的一些变量。
接着是通过初始化PipeLine,这里主要初始化sensor和display模块,�配置摄像头输出两路不同的格式和大小的图像,以及设置显示模式,完成创建PipeLine实例。
然后调用自定义FaceDetectionApp类完成对AIBase接口的初始化以及使用Ai2D接口的一些方法定义人脸检测模型输入图像的预处理方法。
最后在一个循环中不断地获取摄像头输出RGBP888格式的图像帧,并将其送入KPU中进行运算,推理图像中是否存在人脸信息,当图像中存在人脸时,会通过print打印人脸结果,接着将这些信息绘制到图像上后,在 LCD 上显示图像。
运行验证
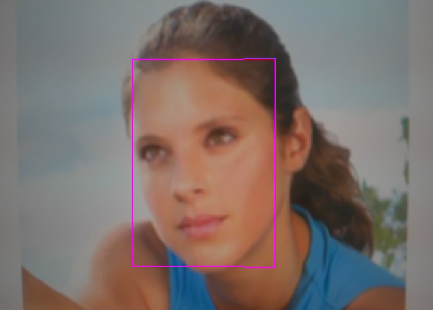
实验原图如下所示:

将K230D BOX开发板连接CanMV IDE,点击CanMV IDE上的“开始(运行脚本)”按钮后,将摄像头对准人脸,让其采集到人脸图像,随后便能在LCD上看到摄像头输出的图像,同时图像中的人脸均被红色的矩形框框出,如下图所示:
点击左下角“串行终端”,可以看到“串行终端”窗口中输出了一系列信息,如下图所示:
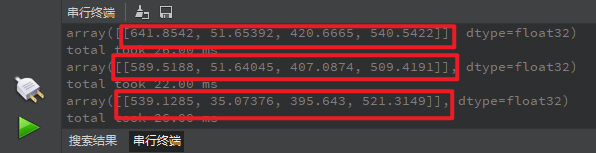
可以看到,二维数组array中存在一个元素,该元素是浮点类型。这个元素表示检测到图像中存在一个人脸。每个元素包含四个数据,可以表示为 [x, y, w, h] 的矩形框,其中x和y是矩形框的左上角坐标,w和h分别表示矩形框的宽度和高��度。这样,我们就可以确定这个人脸在RGBP888图像中的位置和大小。为了准确地显示在屏幕上,我们需要将这些坐标和尺寸乘以一个缩放值(即LCD显示的分辨率与RGBP888图像尺寸的比值),从而获得在LCD显示器中人脸的区域。根据获得的值绘制矩形框,即可将人脸标注出来。