摄像头实验
前言
DNESP32S3 BOX3开发板板载了一个摄像头接口,该接口可以用来连接GC0308等摄像头模块。本章,我们将使用ESP32-S3驱动GC0308摄像头模块,实现摄像头功能。
GC0308介绍
GC0308是一款1/6.5英寸光学格式的VGA(640×480)CMOS图像传感器,采用3.4μm像素尺寸和4晶体管像素结构。其内置10位ADC和图像信号处理器(ISP),支持YCbCr4:2:2、RGB565及Raw Bayer等多种输出格式,并具备自动曝光(AE)与自动白平衡(AWB)功能。该芯片仅需2.8V单电源供电,功耗低(工作时约70mW,待机仅10μA),最高支持30fps帧率。主要应用于手机摄像头、PC相机、视频会议、安防监控及条码识别等嵌入式视觉场景,采用20-ball CSP封装。
硬件设计
例程功能
- 本章实验功能简介:程序下载完成,摄像头的图像数据在 LCD 显示屏上显示。
硬件资源
- 正点原子2.4寸LCD屏幕
- GC0308摄像头模块
原理图
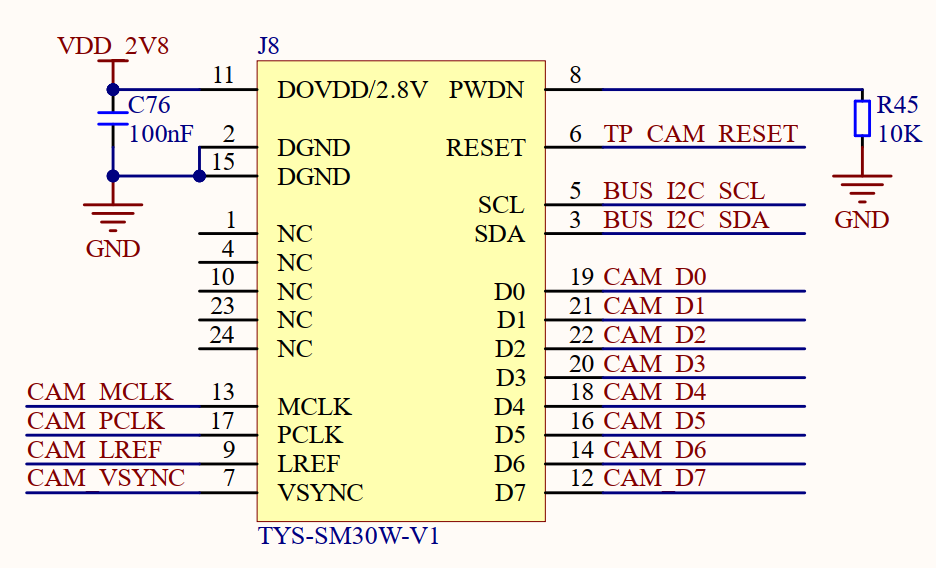
CAMERA 接口与 ESP32-S3 的连接关系,如下图所示:
程序设计
CAMERA 函数解析
本章实验要使用到乐鑫官方的 esp32-camera 驱动库,此驱动库承载 ESP32 系列 Soc 兼容的图像传感器驱动程序。此外,它还提供了一些工具,允许将捕获的帧数据转换为更常见的 BMP和 JPEG 格式。接下来,作者将介绍一些常用的 ESP32-S3 中的 CAMERA 函数,这些函数的描述及其作用如下:
初始化摄像头驱动
该函数用于检测并配置摄像头,其函数原型如下所示
esp_err_t esp_camera_init(const camera_config_t *config)
该函数的形参描述如下表所示:
| 参数 | 描述 |
|---|---|
| config | 这是指向摄像机配置参数的指针 |
【返回值】
返回值:ESP_OK配置成功。其他配置失败。
获取摄像头图像传感器备配置
该函数用于获取指向图像传感器控制结构的指针,其函数原型如下所示:
sensor_t * esp_camera_sensor_get(void);
【返回值】
| 参数 | 描述 |
|---|---|
| NULL | 返回: 0,即空 |
| &s_state->sensor | 指向结构体参数 camera_state_t |
CAMERA 驱动解析
在IDF版的15_camera例程中,作者在15_camera \components\Middlewares路径下新增了一个espressif__esp32-camera文件夹,分别用于存放乐鑫官方的摄像头驱动文件。那么对于官方的第三方库我们这里就不做解析了。
CMakeLists.txt文件
打开本实验的BSP文件夹下的CMakeList.txt文件,其内容如下所示:
set(src_dirs
MYIIC
MYSPI
LCD
AW9523B)
set(include_dirs
MYIIC
MYSPI
LCD
AW9523B)
set(requires
driver
esp_lcd)
idf_component_register(SRC_DIRS ${src_dirs} INCLUDE_DIRS ${include_dirs} REQUIRES ${requires})
component_compile_options(-ffast-math -O3 -Wno-error=format=-Wno-format)
上述代码中的驱动需要由开发者自行添加,以确保驱动能够顺利集成到构建系统中。这一步骤是必不可少的,它确保了驱动的正确性和可用性,为后续的开发工作提供了坚实的基础。
实验应用代码
打开main.c文件,该文件定义了工程入口函数,名为main。该函数代码如下。
/* 引脚配置 */
#define CAM_PIN_PWDN GPIO_NUM_NC
#define CAM_PIN_RESET GPIO_NUM_NC
#define CAM_PIN_VSYNC GPIO_NUM_6
#define CAM_PIN_LREF GPIO_NUM_46
#define CAM_PIN_PCLK GPIO_NUM_45
#define CAM_PIN_XCLK GPIO_NUM_NC
#define CAM_PIN_SIOD GPIO_NUM_NC
#define CAM_PIN_SIOC GPIO_NUM_NC
#define CAM_PIN_D0 GPIO_NUM_7
#define CAM_PIN_D1 GPIO_NUM_8
#define CAM_PIN_D2 GPIO_NUM_9
#define CAM_PIN_D3 GPIO_NUM_10
#define CAM_PIN_D4 GPIO_NUM_11
#define CAM_PIN_D5 GPIO_NUM_12
#define CAM_PIN_D6 GPIO_NUM_4
#define CAM_PIN_D7 GPIO_NUM_5
#define CAM_RST(x) do{ x ? \
(aw9523b_pin_write(TP_CAM_RESET, 1)): \
(aw9523b_pin_write(TP_CAM_RESET, 0)); \
}while(0)
#define CAM_2V8_EN(x) do{ x ? \
(aw9523b_pin_write(VDD_2V8_EN, 1)): \
(aw9523b_pin_write(VDD_2V8_EN, 0)); \
}while(0)
#define CAM_VBAT_EN(x) do{ x ? \
(aw9523b_pin_write(VBAT_EN, 1)): \
(aw9523b_pin_write(VBAT_EN, 0)); \
}while(0)
/* 摄像头配置 */
static camera_config_t camera_config = {
/* 引脚配置 */
.pin_pwdn = CAM_PIN_PWDN,
.pin_reset = CAM_PIN_RESET,
.pin_xclk = CAM_PIN_XCLK,
.pin_sccb_sda = -1,
.pin_sccb_scl = -1,
.sccb_i2c_port = I2C_NUM_0,
.pin_d7 = CAM_PIN_D7,
.pin_d6 = CAM_PIN_D6,
.pin_d5 = CAM_PIN_D5,
.pin_d4 = CAM_PIN_D4,
.pin_d3 = CAM_PIN_D3,
.pin_d2 = CAM_PIN_D2,
.pin_d1 = CAM_PIN_D1,
.pin_d0 = CAM_PIN_D0,
.pin_vsync = CAM_PIN_VSYNC,
.pin_href = CAM_PIN_LREF,
.pin_pclk = CAM_PIN_PCLK,
/* XCLK 20MHz or 10MHz for OV2640 double FPS (Experimental) */
.xclk_freq_hz = 24000000,
.ledc_timer = LEDC_TIMER_0,
.ledc_channel = LEDC_CHANNEL_0,
.pixel_format = PIXFORMAT_RGB565, /* YUV422,GRAYSCALE,RGB565,JPEG */
.frame_size = FRAMESIZE_QVGA, /* QQVGA-UXGA, For ESP32, do not use sizes above QVGA when not JPEG. The performance of the ESP32-S series has improved a lot, but JPEG mode always gives better frame rates */
.jpeg_quality = 12, /* 0-63, for OV series camera sensors, lower number means higher quality */
.fb_count = 2, /* When jpeg mode is used, if fb_count more than one, the driver will work in continuous mode */
.fb_location = CAMERA_FB_IN_PSRAM,
.grab_mode = CAMERA_GRAB_WHEN_EMPTY,
};
/**
* @brief 摄像头初始化
* @param 无
* @retval esp_err_t
*/
static esp_err_t init_camera(void)
{
if (CAM_PIN_PWDN == GPIO_NUM_NC)
{
CAM_VBAT_EN(1);
CAM_2V8_EN(1);
}
if (CAM_PIN_RESET == GPIO_NUM_NC)
{
CAM_RST(0);
vTaskDelay(pdMS_TO_TICKS(20));
CAM_RST(1);
vTaskDelay(pdMS_TO_TICKS(20));
}
/* 摄像头初始化 */
esp_err_t err = esp_camera_init(&camera_config);
if (err != ESP_OK)
{
ESP_LOGE("TAG", "Camera Init Failed");
return err;
}
sensor_t * s = esp_camera_sensor_get();
/* 如果摄像头模块是OV3660或者是OV5640,则需要以下配置 */
if (s->id.PID == OV3660_PID)
{
s->set_vflip(s, 1); /* 向后翻转 */
s->set_brightness(s, 1); /* 亮度提高 */
s->set_saturation(s, -2); /* 降低饱和度 */
}
else if (s->id.PID == OV5640_PID)
{
s->set_vflip(s, 1); /* 向后翻转 */
}
else if (s->id.PID == GC0308_PID)
{
s->set_vflip(s, 0); /* 垂直翻转 */
s->set_hmirror(s, 0); /* 水平镜像 */
s->set_contrast(s, 0); /* 对比度 */
}
return ESP_OK;
}
/**
* @brief 程序入口
* @param 无
* @retval 无
*/
void app_main(void)
{
esp_err_t ret;
camera_fb_t *fb = NULL;
ret = nvs_flash_init(); /* 初始化NVS */
if (ret == ESP_ERR_NVS_NO_FREE_PAGES || ret == ESP_ERR_NVS_NEW_VERSION_FOUND)
{
ESP_ERROR_CHECK(nvs_flash_erase());
ESP_ERROR_CHECK(nvs_flash_init());
}
my_spi_init(); /* 初始化SPI */
myiic_init(); /* 初始化IIC */
aw9523b_init(); /* 初始化AW9523B */
lcd_init(); /* 初始化LCD */
if (init_camera() != ESP_OK)
{
ESP_LOGE("TAG", "Camera initialization failed, system halted");
while (1)
{
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
lcd_show_string(30, 50, 200, 16, 16, "ESP32-S3", RED);
lcd_show_string(30, 70, 200, 16, 16, "CAMERA TEST", RED);
lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);
vTaskDelay(pdMS_TO_TICKS(1500));
while(1)
{
fb = esp_camera_fb_get();
if (fb != NULL)
{
esp_lcd_panel_draw_bitmap(panel_handle, 0, 0, fb->width, fb->height, fb->buf);
esp_camera_fb_return(fb);
}
vTaskDelay(pdMS_TO_TICKS(1)); /* 添加延时,避免过度占用CPU */
}
}
该代码实现ESP32-S3摄像头系统初始化与图像采集。通过AW9523B扩展器控制GC0308模组的2.8V电源和复位信号,配置8位并行DVP接口(D0-D7、VSYNC、HREF、PCLK)。摄像头初始化为RGB565格式、QVGA分辨率,主循环持续获取帧缓冲并通过LCD显示,支持多款传感器(OV3660/OV5640/GC0308)的差异化配置。
下载验证
程序下载到开发板后, LCD 显示屏不断更新摄像头输出的图像数据,如下图所示。
