按键输入实验
前言
本章将通过一个经典的按键实验,带大家开启ESP32S3的开发之旅。同时,我们也将重点关注GPIO的输入模式配置,学会如何获取外部的输入信号,例如检测按键的状态。通过学习本章内容,开发者将能够掌握GPIO作为输入模式的使用方法,进一步扩展其在嵌入式系统开发中的应用能力。
GPIO & 独立按键基础知识
GPIO简介
GPIO 是负责控制或采集外部器件信息的外设,主要负责输入输出功能。ESP32S3提供45个3.3V GPIO管脚,支持数字I/O、PWM、I2C、SPI、UART、12-bit ADC和DAC。内置上拉/下拉电阻,部分引脚有启动电平限制,适用于外设控制与传感应用。另外,这些管脚,可以通过内部 IO MUX(复用矩阵)灵活复用为其他功能,这充分展现了 ESP32-S3 芯片的强大和灵活性。 关于ESP32-S3 的IO MUX 和 GPIO 交换矩阵的内容已在DNESP32S3 BOX1这款开发板的《ESP32S3 BOX 使用指南—IDF版》的第三章中详细阐述,有兴趣的读者可以自行前往阅读,此处不再赘述。以下是ESP32S3芯片的GPIO分布图。
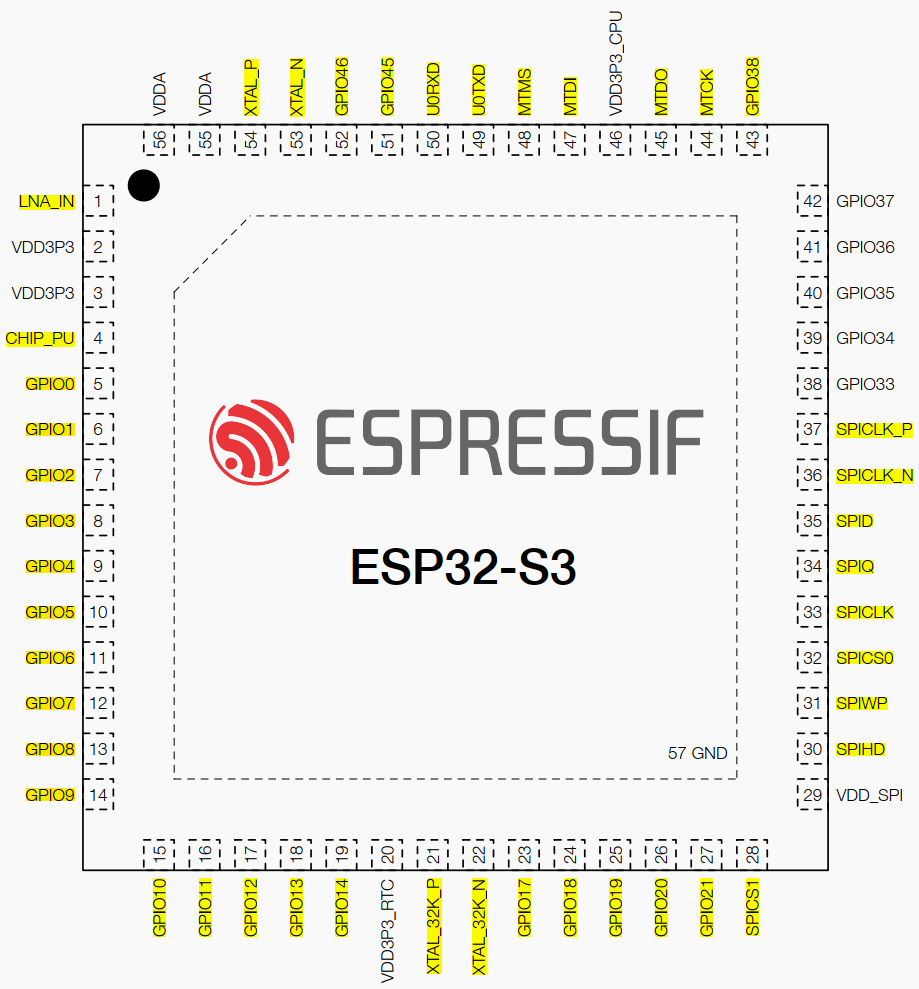
从上面的图示中可见,黄色区域的管脚便是ESP32S3提供45个GPIO管脚。但请注意,部分IO端口可能与Flash或PSRAM等元件的管脚相关联,这就需要开发者在操作过程中参考相关技术手册,以避免潜在的问题。在正点原子的DNESP32S3 BOX3开发板中,模组的GPIO0被用来连接按键K0,因此在本章的实验中,我们将主要对GPIO0进行操作。
独立按键简介
独立按键是一种简洁高效的输入设备,广泛应用于各类电子设备中,实现基础的用户交互功能。其工作原理主要基于机械开关的触发机制,当用户按下按键时,便能执行相应的操作。独立按键在尺寸、形状和颜色上都具有多样性,便于用户进行辨识和使用,满足不同场景下的需求。
1,独立按键原理
独立按键的原理主要依赖于机械触点和电气触点之间的相互作用。在未被按下时,触点保持分离状态,电路处于断开状态。然而,当用户按下按键时,在弹簧和导电片的共同作用下,触点会闭合,从而使电路连通。此时,微控制器能够检测到按键触发的信号,进而执行相应的操作。这种基于物理触点的设计使得独立按键既稳定又可靠,广泛应用于各种电子设备中。
2,消抖措施
机械按键在闭合与分开的过程中,由于机械振动(类似于弹簧效应)的存在,可能导致开关状态在短时间内频繁切换,这种现象被称为按键抖动。下图是独立按键抖动波形图。
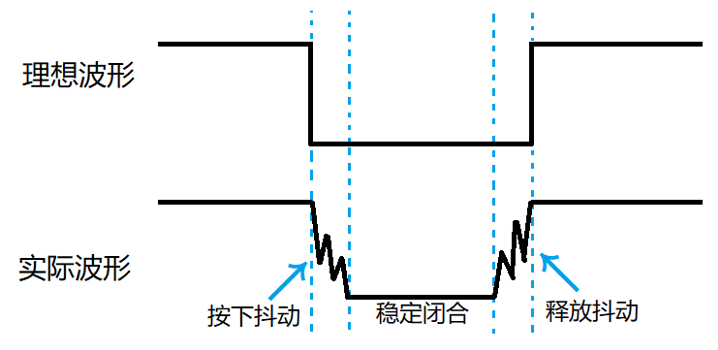
图中的按下抖动和释放抖动的时间一般为5~10ms,如果在抖动阶段采样,其不稳定状态可能出现一次按键动作被认为是多次按下的情况。为了避免抖动可能带来的误操作,我们要做的措施就是给按键消抖(即采样稳定闭合阶段)。为了消除这种抖动,我们通常采用软件消抖和硬件消抖两种主要方法:
(1)软件消抖:主要是通过编程的方法,设定一个延迟或计时器,确保在一定的时间内只读取一次按键状态,避免抖动对程序的影响。
(2)硬件消抖:在按键电路中加入元器件如电阻、电容组成的RC低通滤波器,对按键信号进行平滑处理,降低抖动的影响。
我们例程中使用最简单的延时消抖。检测到按键按下后,一般进行10ms延时,用于跳过抖动的时间段,如果消抖效果不好可以调整这个10ms延时,因为不同类型的按键抖动时间可能有偏差。待延时过后再检测按键状态,如果没有按下,那我们就判断这是抖动或者干扰造成的;如果还是按下,那么我们就认为这是按键真的按下了。对按键释放的判断同理。
硬件设计
例程功能
- 按下K0按键,系统打印对应的信息。
硬件资源
- 按键: K0-GPIO0
原理图
本章实验使用的一个DNESP32S3 BOX3开发板板载按键:K0按键,其于板载MCU的连接原理图,如下图所示:
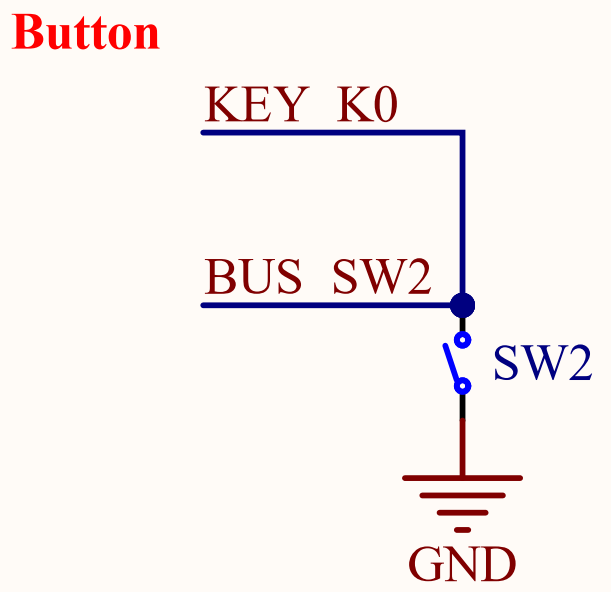
从上面的原理图中可以看出,K0按键的一端连接到了电源负极,而另一端分别与MCU的KEY_K0(GPIO0)引脚相连接,因此当按键被按下时,MCU对应的引脚都能够读取到低电平的状态,而当松开按键后,MCU对应的引脚读取到的电平状态却是不确定的,因此用于读取KEY_K0引脚不仅要配置为输入模式,还需要配置成上拉。
程序设计
GPIO函数解析
ESP-IDF提供了丰富的 GPIO 操作函数,开发者可以在esp-idf-v5.5.1\components\driver\gpio路径下找到相关的 gpio.c 和 gpio.h 文件。在 gpio.h 头文件中,你可以找到 ESP32-S3 的所有 GPIO 函数定义。接下来,作者将介绍一些常用的 GPIO 函数,这些函数的描述及其作用如下:
GPIO 配置函数
该函数用来配置 GPIO 的模式、上下拉等功能,其函数原型如下所示:
esp_err_t gpio_config(const gpio_config_t *pGPIOConfig)
该函数的形参描述如下表所示:
| 参数 | 描述 |
|---|---|
| *pGPIOConfig | GPIO 结构体 |
【返回值】
ESP_OK 表示配置成功, ESP_FAIL 表示配置失败。
pGPIOConfig 为 GPIO 配置结构体指针,下面来看一下 gpio_config_t 结构体中的变量,如下所示:
/* GPIO 配置参数 */
typedef struct {
uint64_t pin_bit_mask; /* 配置引脚位 */
gpio_mode_t mode; /* 设置引脚模式 */
gpio_pullup_t pull_up_en; /* 设置上拉 */
gpio_pulldown_t pull_down_en; /* 设置下拉 */
gpio_int_type_t intr_type; /* 中断配置 */
} gpio_config_t;
GPIO 设置管脚输出电平
该函数用于配置某个管脚输出电平,该函数原型如下所示:
esp_err_t gpio_set_level(gpio_num_t gpio_num, uint32_t level)
该函数的形参描述如下表所示:
| 参数 | 描述 |
|---|---|
| gpio_num | GPIO 引脚号。(在 gpio_types.h 文件中枚举 gpio_num_t 有定义) |
| level | GPIO 引脚输出电平。 0表示低电平, 1表示高电平。 |
【返回值】
ESP_OK 表示设置成功, ESP_FAIL 表示设置失败。
GPIO 获取管脚电平
该函数用于获取某个管脚的电平,该函数原型如下所示:
esp_err_t gpio_get_level(gpio_num_t gpio_num)
该函数的形参描述如下表所示:
| 参数 | 描述 |
|---|---|
| gpio_num | GPIO 引脚号。(在 gpio_types.h 文件中枚举 gpio_num_t 有定义) |
【返回值】
ESP_OK 表示获取成功, ESP_FAIL 表示获取失败。
上述函数,便是本实验所需的核心 GPIO 函数。对于其他未提及的 GPIO 函数,我们用到了 再去了解。
KEY驱动解析
在IDF版本的02_key例程中,作者在02_key\components\BSP路径下新增了一个KEY文件夹,用于存放key.c和key.h这两个文件。其中,key.h文件负责声明KEY相关的函数和变量,而key.c文件则实现了KEY的驱动代码。下面,我们将详细解析这两个文件的实现内容。
1,key.h文件
#ifndef __KEY_H_
#define __KEY_H_
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "driver/gpio.h"
/* 引脚定义 */
#define BOOT_GPIO_PIN GPIO_NUM_0
/*IO操作*/
#define BOOT gpio_get_level(BOOT_GPIO_PIN)
/* 按键按下定义 */
#define BOOT_PRES 1 /* BOOT按键按下 */
/* 函数声明 */
void key_init(void); /* 初始化按键 */
uint8_t key_scan(uint8_t mode); /* 按键扫描函数 */
#endif
此文件的核心内容已较为明确,无需过多阐述。它主要定义了 KEY0(开发板上为 K0 按键)宏,用于获取 GPIO0 的状态,并声明了 key_init 和 key_scan 函数,以便外部文件能够调用这些函数。通过这些声明和定义,该文件为其他部分的代码提供了必要的接口和功能支持。
2,key.c文件
此文件中定义了两个函数,分别为 key_init和 key_scan。接下来,我将对这两个函数进行详细的解析。
(1)key_init 函数
/**
* @brief 初始化按键
* @param 无
* @retval 无
*/
void key_init(void)
{
gpio_config_t gpio_init_struct;
gpio_init_struct.intr_type = GPIO_INTR_DISABLE; /* 失能引脚中断 */
gpio_init_struct.mode = GPIO_MODE_INPUT; /* 输入模式 */
gpio_init_struct.pull_up_en = GPIO_PULLUP_ENABLE; /* 使能上拉 */
gpio_init_struct.pull_down_en = GPIO_PULLDOWN_DISABLE; /* 失能下拉 */
gpio_init_struct.pin_bit_mask = 1ull << KEY0_GPIO_PIN; /* KEY0按键引脚 */
gpio_config(&gpio_init_struct); /* 配置使能 */
}
/**
* @brief 按键扫描函数
* @param mode:0 / 1, 具体含义如下:
* 0, 不支持连续按(当按键按下不放时, 只有第一次调用会返回键值,
* 必须松开以后, 再次按下才会返回其他键值)
* 1, 支持连续按(当按键按下不放时, 每次调用该函数都会返回键值)
* @retval 键值, 定义如下:
* KEY0_PRES, 1, KEY0按下
*/
uint8_t key_scan(uint8_t mode)
{
uint8_t keyval = 0;
static uint8_t key_boot = 1; /* 按键松开标志 */
if(mode)
{
key_boot = 1;
}
if (key_boot && (KEY0 == 0)) /* 按键松开标志为1,且有任意一个按键按下了 */
{
vTaskDelay(10); /* 去抖动 */
key_boot = 0;
if (KEY0 == 0)
{
keyval = KEY0_PRES;
}
}
else if (KEY0 == 1)
{
key_boot = 1;
}
return keyval; /* 返回键值 */
}
key_init()函数主要配置 GPIO0 管脚为输入模式,这样就可以获取 GPIO0 的电平状态了。key_scan()函数只有一个形参 mode,用于设置按键是否支持连续按下模式。当 mode 为 0 时,表示按键不支持连续按下;反之,则支持连续按下。值得注意的是,该函数内部已经对按键进行了消抖延时处理,因此,在其他地方调用此函数时,无需再进行额外的按键消抖操作。
CMakeLists.txt文件
打开本实验的BSP文件夹下的CMakeList.txt文件,其内容如下所示:
set(src_dirs
KEY)
set(include_dirs
KEY)
set(requires
driver)
idf_component_register(SRC_DIRS ${src_dirs} INCLUDE_DIRS ${include_dirs} REQUIRES ${requires})
component_compile_options(-ffast-math -O3 -Wno-error=format=-Wno-format)
上述代码中的 KEY 驱动需要由开发者自行添加,以确保 KEY 驱动能够顺利集成到构建系统中。这一步骤是必不可少的,它确保了 KEY 驱动的正确性和可用性,为后续的开发工作提供了坚实的基础。
实验应用代码
打开 main/main.c 文件,该文件定义了工程入口函数,名为"app_main",该函数代码如下。
/**
* @brief 程序入口
* @param 无
* @retval 无
*/
void app_main(void)
{
uint8_t key;
esp_err_t ret;
ret = nvs_flash_init(); /* 初始化NVS */
if (ret == ESP_ERR_NVS_NO_FREE_PAGES || ret == ESP_ERR_NVS_NEW_VERSION_FOUND)
{
ESP_ERROR_CHECK(nvs_flash_erase());
ret = nvs_flash_init();
}
key_init(); /* KEY初始化 */
while(1)
{
key = key_scan(0); /* 获取键值 */
switch (key)
{
case KEY0_PRES: /* KEY0被按下 */
{
ESP_LOGI("KEY", "KEY0 pressed");
break;
}
default:
{
break;
}
}
vTaskDelay(10);
}
}
可以看到应用代码中,在初始化完按键后,就进入了一个while循环�,在循环中,每间隔10毫秒就调用key_scan()函数扫描以此按键的状态,如果扫描到KEY0按键被按下,则系统回打印相应的实验信息。
下载验证
在完成编译和烧录操作后,若此时按下并释放一次KEY0按键,则能够通过VSCode的终端或者串口助手(需选择对应的设备)看到打印出的实验信息,与预期的实验现象效果相符。