三轴传感器实验
前言
本章,我们将介绍一款高性价比三轴角速度传感器。本章我们将使用ESP32S3 来驱动 SC7A20H,读取其原始数据,并结合 LCD 显示,教大家如何使用这款三轴传感器。
SC7A20H简介
SC7A20HTR 是一款由士兰微电子推出的超低功耗、高精度三轴数字加速度计。它支持 ±2/±4/±8/±16g 多量程,提供 12-bit 分辨率和 1.56Hz 至 4.434kHz 的灵活输出速率。芯片工作电压宽(1.71V-3.6V),在低功耗模式下电流可低至 2µA,并具备掉电模式。它通过 I²C 或 SPI 接口通信,内置 32 级 FIFO、多种智能中断(如点击、自由落体、方向检测)以及自测试功能,采用紧凑的 2x2mm LGA-12 封装,非常适合空间和功耗敏感的便携式及物联网设备。
硬件设计
例程功能
在 LCD 显示屏上,我们能够看到 XYZ 的数据。当我们翻转开发板时,这些数据会根据开发板的翻转角度来计算出 pitch 俯仰角和 roll 翻滚角。
硬件资源
- LED灯
- 正点原子2.4寸LCD屏幕
- SC7A20H
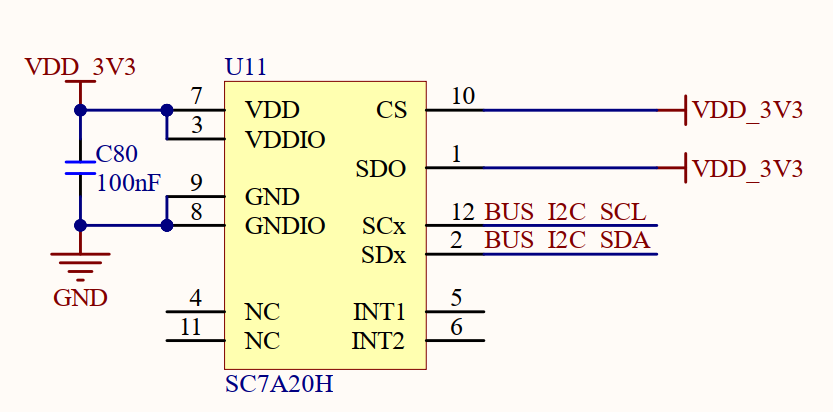
原理图
SC7A20H器件相关原理图,如下图所示:
程序设计
SC7A20H 函数解析
由于SC7A20H使用了IIC进行驱动,那么关于IIC的API函数的介绍作者在前边的IIC_EXIO实验章节中已经讲解过了,在此不再赘述。
SC7A20H 驱动解析
在 IDF 版 13_sc7a20h 例程中,作者在 13_sc7a20h\components\BSP 路径下新增了一个 SC7A20H 文件夹,分别用于存放 sc7a20h.c、 sc7a20h.h sc7a20h.h 文件负责声明温度传感器相关的函数和变量,而 sc7a20h.c 文件则实现了温度传感器的驱动代码。下面,我们将详细解析这两个文件的实现内容。
sc7a20h.h文件
/* SC7A20HA相关宏定义 */
#define SC7A20H_ADDR 0x19 /* SDO引脚悬空/高电平时的地址,接地时为0x18 */
#define SC7A20H_ID 0x11 /* 设备ID */
#define ONE_G 9.807f /* 加速度单位转换使用 */
#define M_PI (3.14159265358979323846f) /* 陀螺仪单位转换使用 */
#define MAX_CALI_COUNT 100 /* 采样次数 */
/* 寄存器地址定义 */
#define SC7A20H_REG_CTRL0 0x1F /* 控制寄存器0 */
#define SC7A20H_REG_CTRL1 0x20 /* 控制寄存器1 */
#define SC7A20H_REG_CTRL2 0x21 /* 控制寄存器2 */
#define SC7A20H_REG_CTRL3 0x22 /* 控制寄存器3 */
#define SC7A20H_REG_CTRL4 0x23 /* 控制寄存器4 */
#define SC7A20H_REG_CTRL5 0x24 /* 控制寄存器5 */
#define SC7A20H_REG_CTRL6 0x25 /* 控制寄存器6 */
#define SC7A20H_DRDY_STATUS_REG 0x27 /* 状态寄存器 */
#define SC7A20H_REG_OUT_X_L 0x28 /* X轴低字节 */
#define SC7A20H_REG_OUT_X_H 0x29 /* X轴高字节 */
#define SC7A20H_REG_OUT_Y_L 0x2A /* Y轴低字节 */
#define SC7A20H_REG_OUT_Y_H 0x2B /* Y轴高字节 */
#define SC7A20H_REG_OUT_Z_L 0x2C /* Z轴低字节 */
#define SC7A20H_REG_OUT_Z_H 0x2D /* Z轴高字节 */
#define SC7A20H_REG_WHO_AM_I 0x0F /* 设备ID寄存器 */
/* 控制寄存器1 (0x20) 位定义 */
#define SC7A20H_ODR_1_56HZ 0x10 /* 1.56Hz输出数据率 */
#define SC7A20H_ODR_12_5HZ 0x20 /* 12.5Hz输出数据率 */
#define SC7A20H_ODR_25HZ 0x30 /* 25Hz输出数据率 */
#define SC7A20H_ODR_50HZ 0x40 /* 50Hz输出数据率 */
#define SC7A20H_ODR_100HZ 0x50 /* 100Hz输出数据率 */
#define SC7A20H_ODR_200HZ 0x60 /* 200Hz输出数据率 */
#define SC7A20H_ODR_400HZ 0x70 /* 400Hz输出数据率 */
#define SC7A20H_ODR_1_48KHZ 0x80 /* 1.48kHz输出数据率 */
#define SC7A20H_ODR_2_66KHZ 0x90 /* 2.66kHz输出数据率 */
#define SC7A20H_ODR_4_434KHZ 0xA0 /* 4.434kHz输出数据率 */
#define SC7A20H_LPEN 0x08 /* 低功耗模式使能 */
#define SC7A20H_ZEN 0x04 /* Z轴使能 */
#define SC7A20H_YEN 0x02 /* Y轴使能 */
#define SC7A20H_XEN 0x01 /* X轴使能 */
#define SC7A20H_ENABLE_ALL_AXES (SC7A20H_XEN | SC7A20H_YEN | SC7A20H_ZEN) // 使能所有轴
/* 控制寄存器4配置 */
#define SC7A20H_SCALE_2G 0x00 /* ±2G量程 */
#define SC7A20H_SCALE_4G 0x10 /* ±4G量程 */
#define SC7A20H_SCALE_8G 0x20 /* ±8G量程 */
#define SC7A20H_SCALE_16G 0x30 /* ±16G量程 */
#define SC7A20H_BDU_ENABLE 0x88 /* 块数据更新使能 */
/* 中断映射 */
#define SC7A20H_MAP_INT1 0x01
#define SC7A20H_MAP_INT2 0x02
typedef struct {
uint8_t data[2];
float acc_x;
float acc_y;
float acc_z;
float acc_g;
float pitch; /* 围绕X轴旋转,也叫做俯仰角 */
float roll; /* 围绕Z轴旋转,也叫翻滚角 */
} sc7a20h_rawdata_t;
/* 函数声明 */
float sc7a20h_get_temperature(void); /* 获取传感器温度 */
uint8_t get_euler_angles(float *pitch, float *roll, float *yaw); /* 获取欧拉角数据 */
void sc7a20h_read_xyz(float *acc, float *gyro); /* 获取加速度计和陀螺仪的三轴数据 */
void sc7a20h_read_rawdata(sc7a20h_rawdata_t *rawdata); /* 读取原始数据 */
esp_err_t sc7a20h_init(void);
sc7a20h.c文件
/* 全局变量缓存区 */
i2c_master_dev_handle_t sc7a20h_handle = NULL;
const char* sc7a20h_name = "sc7a20h";
#define M_G 9.80665f
#define RAD_TO_DEG (180.0f / M_PI) /* 0.017453292519943295 */
#define SC7A20H_AUTO_INCREMENT 0x80
/**
* @brief 读取sc7a20h寄存器的数据
* @param reg_addr : 要读取的寄存器地址
* @param data : 读取的数据
* @param len : 数据大小
* @retval 错误值 :0成功,其他值:错误
*/
esp_err_t sc7a20h_register_read(const uint8_t reg, uint8_t *data, const size_t len)
{
uint8_t reg_addr = reg;
if (len > 1)
{
reg_addr |= SC7A20H_AUTO_INCREMENT;
}
return i2c_master_transmit_receive(sc7a20h_handle, ®_addr, 1, data, len, -1);
}
/**
* @brief 向sc7a20h寄存器写数据
* @param reg_addr : 要写入的寄存器地址
* @param data : 要写入的数据
* @retval 错误值 :0成功,其他值:错误
*/
static esp_err_t sc7a20h_register_write_byte(uint8_t reg, uint8_t data)
{
esp_err_t ret;
uint8_t *buf = malloc(2);
if (buf == NULL)
{
ESP_LOGE(sc7a20h_name, "%s memory failed", __func__);
return ESP_ERR_NO_MEM;
}
buf[0] = reg;
buf[1] = data;
ret = i2c_master_transmit(sc7a20h_handle, buf, 2, -1);
free(buf);
return ret;
}
/**
* @brief 读取单轴12位加速度值(左对齐,带符号扩展)
* @param lsb_addr: 低字节寄存器地址 (e.g., 0x28)
* @param msb_addr: 高字节寄存器地址 (e.g., 0x29)
* @retval int16_t: 原始12位有符号值(单位:LSB,±2048 对应 ±2G)
*/
static int16_t sc7a20h_read_axis_12bit(uint8_t lsb_addr, uint8_t msb_addr)
{
uint8_t lsb, msb;
esp_err_t ret;
/* 先读低字节 */
ret = sc7a20h_register_read(lsb_addr, &lsb, 1);
if (ret != ESP_OK)
{
return 0;
}
ret = sc7a20h_register_read(msb_addr, &msb, 1);
if (ret != ESP_OK) return 0;
uint16_t temp = ((uint16_t)msb << 8) | lsb;
temp >>= 4;
if (msb & 0x80)
{
temp |= 0xF000; /* 补高4位为1(16位补码) */
}
else
{
temp &= 0x0FFF; /* 清高4位(确保非负) */
}
return (int16_t)temp;
}
uint8_t xyz_data[6] = {0};
short raw_data[3] = {0};
float accl_data[3];
float acc_normal;
float scale_factor = 0.001f; /* 默认±2G量程,1mg/digit */
/**
* @brief 读取三轴数据(原始数据、加速度、俯仰角和翻滚角)
* @param rawdata:sc7a20h数据结构体
* @retval 无
*/
void sc7a20h_read_rawdata(sc7a20h_rawdata_t *rawdata)
{
float sensor_acc_x;
float sensor_acc_y;
float sensor_acc_z;
if (sc7a20h_register_read(SC7A20H_REG_OUT_X_L, xyz_data, 6) != ESP_OK)
{
return;
}
/* 组合高低字节,SC7A20H为12位数据,左对齐 */
raw_data[0] = (int16_t)(((uint16_t)xyz_data[1] << 8) | xyz_data[0]) >> 4;
raw_data[1] = (int16_t)(((uint16_t)xyz_data[3] << 8) | xyz_data[2]) >> 4;
raw_data[2] = (int16_t)(((uint16_t)xyz_data[5] << 8) | xyz_data[4]) >> 4;
sensor_acc_x = (float)raw_data[0] * M_G / 1024.0f;
sensor_acc_y = (float)raw_data[1] * M_G / 1024.0f;
sensor_acc_z = (float)raw_data[2] * M_G / 1024.0f;
rawdata->acc_x = sensor_acc_y;
rawdata->acc_y = -sensor_acc_x;
rawdata->acc_z = -sensor_acc_z;
rawdata->acc_g = sqrt(rawdata->acc_x*rawdata->acc_x + rawdata->acc_y * rawdata->acc_y + rawdata->acc_z*rawdata->acc_z);
acc_normal = sqrtf(rawdata->acc_x * rawdata->acc_x + rawdata->acc_y * rawdata->acc_y + rawdata->acc_z * rawdata->acc_z);
if (acc_normal == 0.0f)
{
rawdata->pitch = 0.0f;
rawdata->roll = 0.0f;
return;
}
accl_data[0] = rawdata->acc_x / acc_normal;
accl_data[1] = rawdata->acc_y / acc_normal;
accl_data[2] = rawdata->acc_z / acc_normal;
rawdata->pitch = atan2f(rawdata->acc_y, rawdata->acc_z) * RAD_TO_DEG;
rawdata->roll = atan2f(rawdata->acc_x, rawdata->acc_z) * RAD_TO_DEG;
}
/**
* @brief 配置自由落体检测
* @param threshold:阈值 (mg)
* @param duration:持续时间 (ODR周期数)
* @retval 无
*/
void sc7a20h_config_freefall(uint8_t threshold, uint8_t duration)
{
/* 配置自由落体阈值 (THS = threshold / 7.81mg) */
uint8_t ths_value = (uint8_t)(threshold / 7.81f);
sc7a20h_register_write_byte(0x32, ths_value); /* AOI1_THS */
/* 配置自由落体持续时间 */
sc7a20h_register_write_byte(0x33, duration); /* AOI1_DURATION */
/* 配置中断源为自由落体 */
sc7a20h_register_write_byte(0x30, 0x90); /* AOI1_CFG (Z低和Y低检测) */
}
/**
* @brief 初始化sc7a20h
* @param 无
* @retval 0, 成功;
1, 失败;
*/
uint8_t sc7a20h_config(void)
{
uint8_t id_data = 0;
/* 读取设备ID */
sc7a20h_register_read(SC7A20H_REG_WHO_AM_I, &id_data, 1);
/* 检查设备ID */
if (id_data != SC7A20H_ID)
{
ESP_LOGE("sc7a20h", "Device ID mismatch: expected 0x%02X, got 0x%02X", SC7A20H_ID, id_data);
return 1;
}
/* 配置控制寄存器1: 100Hz ODR, 使能三轴, 正常模式 */
uint8_t ctrl_reg1_val = SC7A20H_ODR_100HZ | SC7A20H_ENABLE_ALL_AXES;
sc7a20h_register_write_byte(SC7A20H_REG_CTRL1, ctrl_reg1_val);
/* 配置控制寄存器4: ±2G量程, 块数据更新使能 */
uint8_t ctrl_reg4_val = SC7A20H_SCALE_2G | SC7A20H_BDU_ENABLE;
sc7a20h_register_write_byte(SC7A20H_REG_CTRL4, ctrl_reg4_val);
/* 配置为正常模式 */
sc7a20h_register_write_byte(0x2E, 0x00); /* FIFO_CTRL_REG (禁用FIFO) */
sc7a20h_register_write_byte(0x24, 0x00); /* CTRL_REG5 (禁用高通滤波器) */
/* 设置量程对应的缩放因子 */
scale_factor = 0.001f; /* ±2G量程,1mg/digit */
ESP_LOGI("sc7a20h", "SC7A20H initialized successfully!");
return 0;
}
/**
* @brief sc7a20h初始化
* @param 无
* @retval 无
*/
esp_err_t sc7a20h_init(void)
{
/* 未调用myiic_init初始化IIC */
if (bus_handle == NULL)
{
ESP_ERROR_CHECK(myiic_init());
}
i2c_device_config_t sc7a20h_i2c_dev_conf = {
.dev_addr_length = I2C_ADDR_BIT_LEN_7, /* 从机地址长度 */
.scl_speed_hz = IIC_SPEED_CLK, /* 传输速率 */
.device_address = SC7A20H_ADDR, /* 从机7位的地址 */
};
/* I2C总线上添加sc7a20h设备 */
ESP_ERROR_CHECK(i2c_master_bus_add_device(bus_handle, &sc7a20h_i2c_dev_conf, &sc7a20h_handle));
while (sc7a20h_config()) /* 检测不到sc7a20h */
{
ESP_LOGE("sc7a20h", "sc7a20h init fail!!!");
vTaskDelay(500);
}
return 0;
}
程序通过IIC总线初始化设备,验证芯片ID后配置100Hz输出速率和±2g量程。核心功能包括读取12位原始加速度数据(左对齐格式),将其转换为标准重力单位(m/s²),并计算俯仰角和翻滚角。代码还实现了自由落体检测配置,通过设置阈值和持续时间参数触发中断。数据处理采用符号扩展确保12位有符号数正确解析,同时支持自动递增寄存器地址以提高读取效率。
CMakeLists.txt文件
打开本实验的BSP文件夹下的CMakeList.txt文件,其内容如下所示:
set(src_dirs
MYIIC
LCD
MYSPI
AW9523B
SC7A20H)
set(include_dirs
MYIIC
LCD
MYSPI
AW9523B
SC7A20H)
set(requires
driver
esp_lcd)
idf_component_register(SRC_DIRS ${src_dirs} INCLUDE_DIRS ${include_dirs} REQUIRES ${requires})
component_compile_options(-ffast-math -O3 -Wno-error=format=-Wno-format)
上述代码中的 SC7A20H 驱动需要由开发者自行添加,以确保 SC7A20H 驱动能够顺利集成到构建系统中。这一步骤是必不可少的,它确保了 SC7A20H 驱动的正确性和可用性,为后续的开发工作提供了坚实的基础。
实验应用代码
打开main.c文件,该文件定义了工程入口函数,名为main。该函数代码如下。
/**
* @brief 显示原始数据
* @param x, y : 坐标
* @param title: 标题
* @param val : 值
* @retval 无
*/
void user_show_mag(uint16_t x, uint16_t y, char *title, float val)
{
char buf[20];
sprintf(buf,"%s%3.1f", title, val); /* 格式化输出 */
lcd_fill(x + 30, y + 16, x + 160, y + 16, WHITE); /* 清除上次数据(最多显示20个字符,20*8=160) */
lcd_show_string(x, y, 160, 16, 16, buf, BLUE); /* 显示字符串 */
}
/**
* @brief 程序入口
* @param 无
* @retval 无
*/
void app_main(void)
{
esp_err_t ret;
uint8_t t = 0;
sc7a20h_rawdata_t xyz_rawdata;
ret = nvs_flash_init(); /* 初始化NVS */
if (ret == ESP_ERR_NVS_NO_FREE_PAGES || ret == ESP_ERR_NVS_NEW_VERSION_FOUND)
{
ESP_ERROR_CHECK(nvs_flash_erase());
ESP_ERROR_CHECK(nvs_flash_init());
}
my_spi_init(); /* 初始化SPI */
myiic_init(); /* 初始化IIC */
aw9523b_init(); /* 初始化AW9523B */
lcd_init(); /* 初始化LCD */
sc7a20h_init(); /* 初始化SC7A20H */
lcd_show_string(30, 50, 200, 16, 16, "ESP32-S3", RED);
lcd_show_string(30, 70, 200, 16, 16, "SC7A20H TEST", RED);
lcd_show_string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", RED);
lcd_show_string(30, 110, 200, 16, 16, " ACC_X :", RED);
lcd_show_string(30, 130, 200, 16, 16, " ACC_Y :", RED);
lcd_show_string(30, 150, 200, 16, 16, " ACC_Z :", RED);
lcd_show_string(30, 170, 200, 16, 16, " Pitch :", RED);
lcd_show_string(30, 190, 200, 16, 16, " Roll :", RED);
while (1)
{
vTaskDelay(pdMS_TO_TICKS(10));
t++;
if (t == 10)
{
sc7a20h_read_rawdata(&xyz_rawdata);
user_show_mag(30, 110, "ACC_X :", xyz_rawdata.acc_x);
user_show_mag(30, 130, "ACC_Y :", xyz_rawdata.acc_y);
user_show_mag(30, 150, "ACC_Z :", xyz_rawdata.acc_z);
user_show_mag(30, 170, "Pitch :", xyz_rawdata.pitch);
user_show_mag(30, 190, "Roll :", xyz_rawdata.roll);
t = 0;
LEDR_TOGGLE();
}
}
}
从上述源码可知,我们首先初始化各个外设,如IIC、 SPI、 XL9555、 SC7A20H和LCD等驱动,然后调用 sc7a20h_read_rawdata ()函数测量数据,最终计算出pitch俯仰角和roll翻滚角数据,并在LCD上显示。LED灯每隔100毫秒状态翻转,实现闪烁效果。
下载验证
将程序下载到开发板后,实验内容如下图所示: